 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Observers Design for Vision-Aided Inertial Navigation Systems
Paper and Code
Feb 09, 2021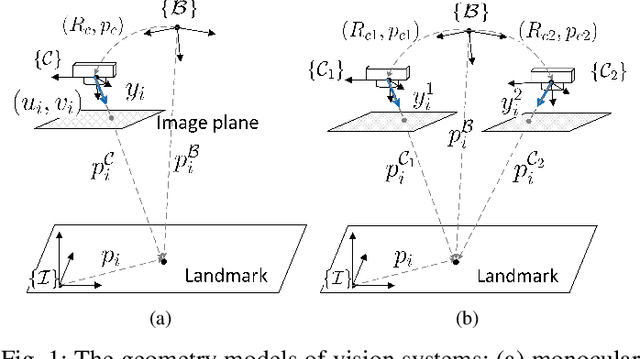
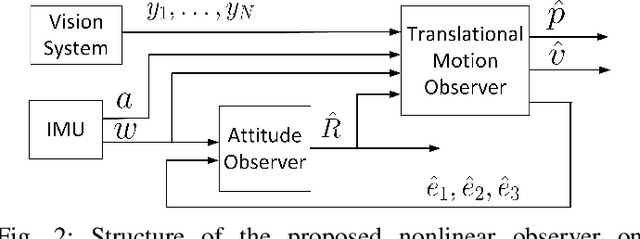
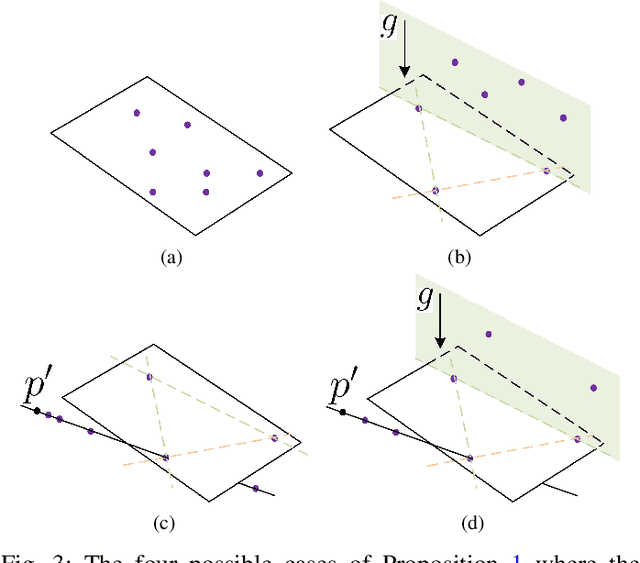
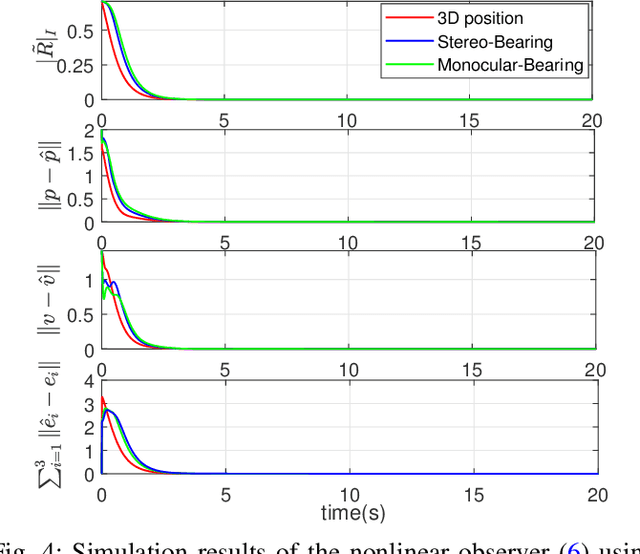
This paper deals with the simultaneous estimation of the attitude, position and linear velocity for vision-aided inertial navigation systems. We propose a nonlinear observer on $SO(3)\times \mathbb{R}^{15}$ relying on body-frame acceleration, angular velocity and (stereo or monocular) bearing measurements of some landmarks that are constant and known in the inertial frame. Unlike the existing local Kalman-type observers, our proposed nonlinear observer guarantees almost global asymptotic stability and local exponential stability. A detailed uniform observability analysis has been conducted and sufficient conditions are derived. Moreover, a hybrid version of the proposed observer is provided to handle the intermittent nature of the measurements in practical applications. Simulation and experimental results are provided to illustrate the effectiveness of the proposed state observer.