Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Attitude Estimation Using Intermittent Linear Velocity and Vector Measurements
Paper and Code
Sep 22, 2021
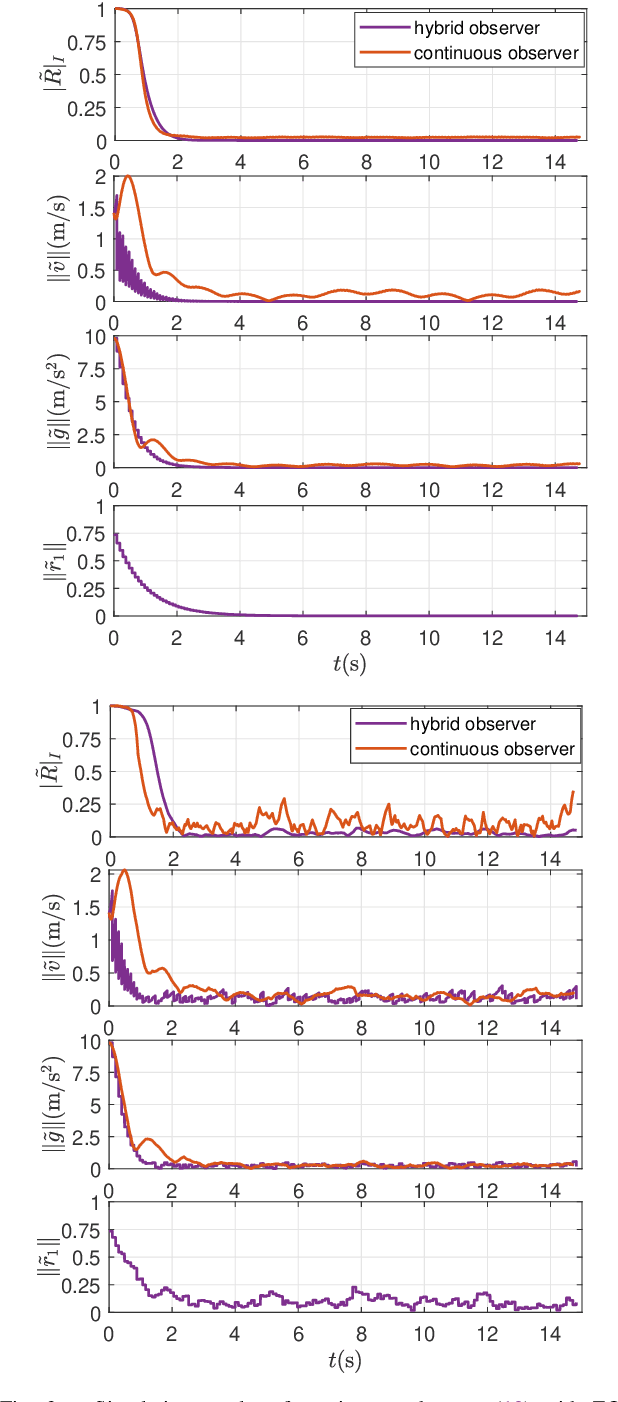
This paper investigates the problem of continuous attitude estimation on $SO(3)$ using continuous angular velocity and linear acceleration measurements as well as intermittent linear velocity and inertial vector measurements. First, we propose a nonlinear observer for the case where all the measurements are continuous and almost global asymptotic stability (AGAS) is shown using the notion of almost global input-to-state stability (ISS) on manifolds. Thereafter, a hybrid attitude observer, with AGAS guarantees, is proposed in terms of intermittent linear velocity and vector measurements. Numerical simulation results are presented to illustrate the performance of the proposed hybrid observer.
* Accepted to the IEEE 60th Conference on Decision and Control (CDC
2021), 8 pages, 3 figures
View paper on