 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Prehensile Manipulation in Clutter with Human-In-The-Loop
Paper and Code

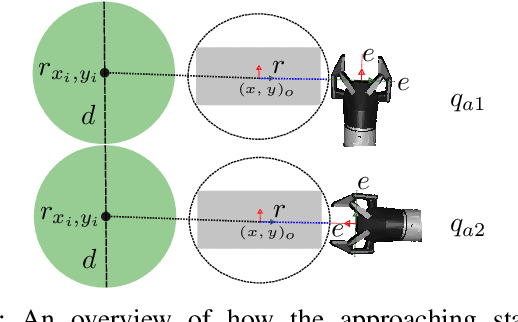
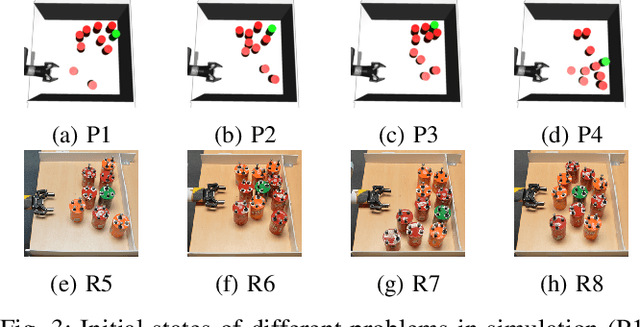
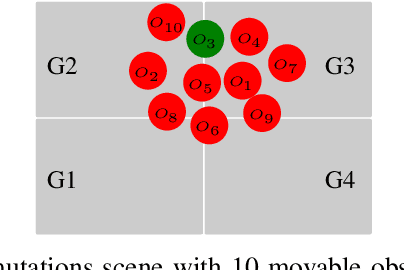
We propose a human-operator guided planning approach to pushing-based robotic manipulation in clutter. Most recent approaches to this problem employs the power of randomized planning (e.g. control-sampling based Kinodynamic RRT) to produce a fast working solution. We build on these control-based randomized planning approaches, but we investigate using them in conjunction with human-operator input. In our framework, the human operator supplies a highlevel plan, in the form of an ordered sequence of objects and their approximate goal positions. We present experiments in simulation and on a real robotic setup, where we compare the success rate and planning times of our human-in-theloop approach with fully autonomous sampling-based planners. We show that the human-operator provided guidance makes the low-level kinodynamic planner solve the planning problem faster and with higher success rates.