 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Holonomic RRT & MPC: Path and Trajectory Planning for an Autonomous Cycle Rickshaw
Paper and Code
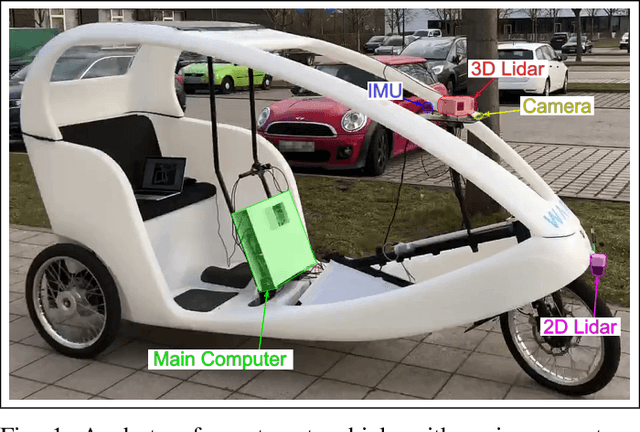
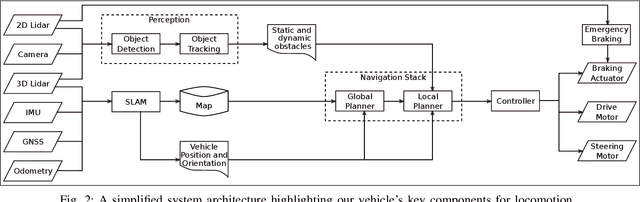
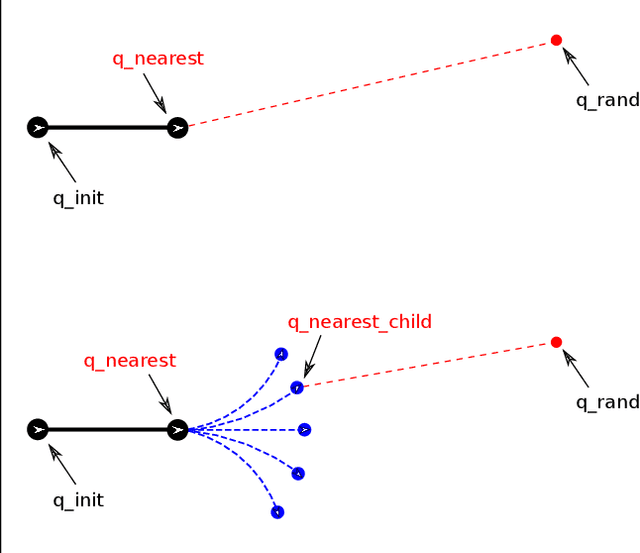
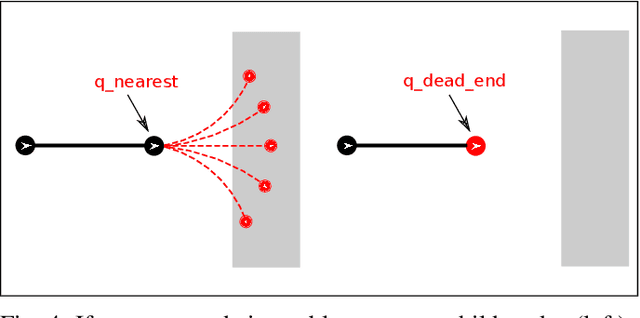
This paper presents a novel hierarchical motion planning approach based on Rapidly-Exploring Random Trees (RRT) for global planning and Model Predictive Control (MPC) for local planning. The approach targets a three-wheeled cycle rickshaw (trishaw) used for autonomous urban transportation in shared spaces. Due to the nature of the vehicle, the algorithms had to be adapted in order to adhere to non-holonomic kinematic constraints using the Kinematic Single-Track Model. The vehicle is designed to offer transportation for people and goods in shared environments such as roads, sidewalks, bicycle lanes but also open spaces that are often occupied by other traffic participants. Therefore, the algorithm presented in this paper needs to anticipate and avoid dynamic obstacles, such as pedestrians or bicycles, but also be fast enough in order to work in real-time so that it can adapt to changes in the environment. Our approach uses an RRT variant for global planning that has been modified for single-track kinematics and improved by exploiting dead-end nodes. This allows us to compute global paths in unstructured environments very fast. In a second step, our MPC-based local planner makes use of the global path to compute the vehicle's trajectory while incorporating dynamic obstacles such as pedestrians and other road users. Our approach has shown to work both in simulation as well as first real-life tests and can be easily extended for more sophisticated behaviors.