 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNNC: Neural-Network Control of Dynamical Systems on Graphs
Paper and Code
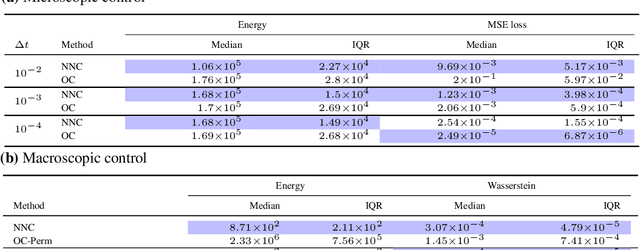
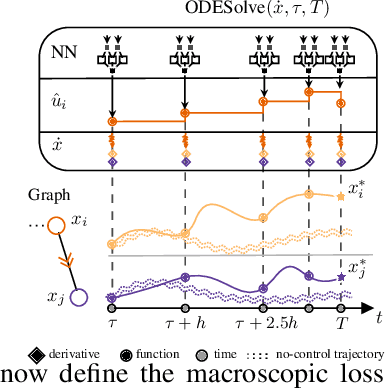
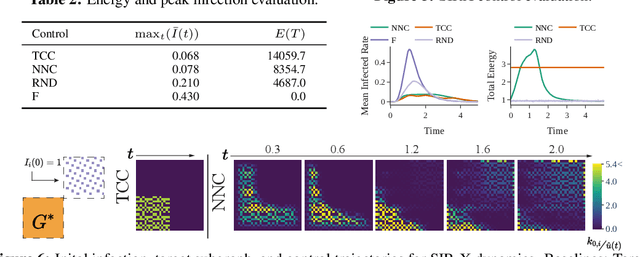
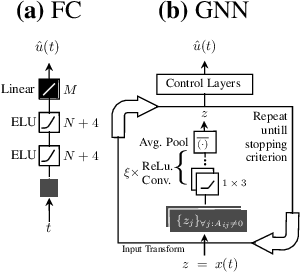
We study the ability of neural networks to steer or control trajectories of dynamical systems on graphs. In particular, we introduce a neural-network control (NNC) framework, which represents dynamical systems by neural ordinary different equations (neural ODEs), and find that NNC can learn control signals that drive networked dynamical systems into desired target states. To identify the influence of different target states on the NNC performance, we study two types of control: (i) microscopic control and (ii) macroscopic control. Microscopic control minimizes the L2 norm between the current and target state and macroscopic control minimizes the corresponding Wasserstein distance. We find that the proposed NNC framework produces low-energy control signals that are highly correlated with those of optimal control. Our results are robust for a wide range of graph structures and (non-)linear dynamical systems.