 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeurosymbolic Motion and Task Planning for Linear Temporal Logic Tasks
Paper and Code
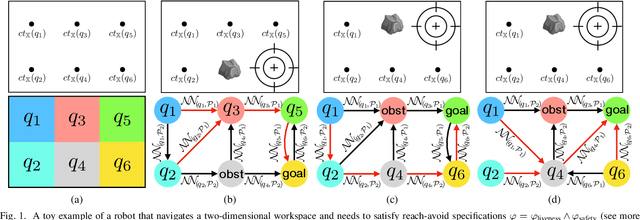
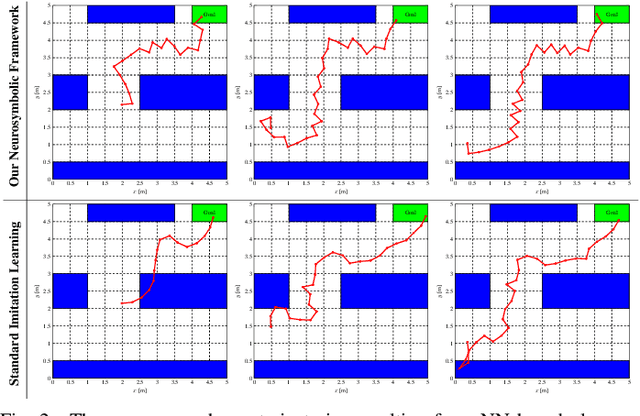
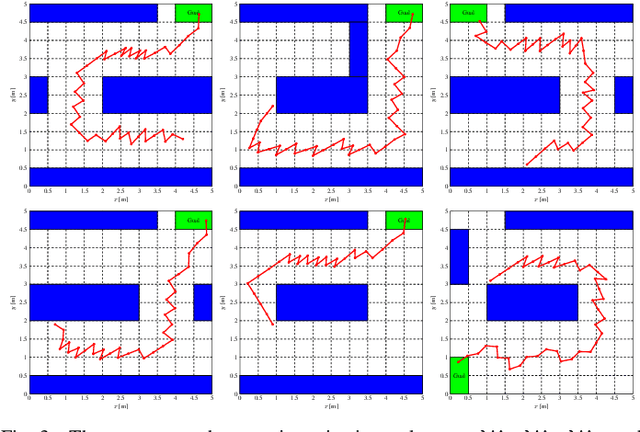
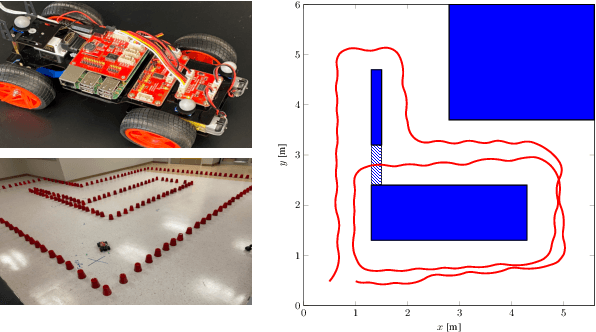
This paper presents a neurosymbolic framework to solve motion planning problems for mobile robots involving temporal goals. The temporal goals are described using temporal logic formulas such as Linear Temporal Logic (LTL) to capture complex tasks. The proposed framework trains Neural Network (NN)-based planners that enjoy strong correctness guarantees when applying to unseen tasks, i.e., the exact task (including workspace, LTL formula, and dynamic constraints of a robot) is unknown during the training of NNs. Our approach to achieving theoretical guarantees and computational efficiency is based on two insights. First, we incorporate a symbolic model into the training of NNs such that the resulting NN-based planner inherits the interpretability and correctness guarantees of the symbolic model. Moreover, the symbolic model serves as a discrete "memory", which is necessary for satisfying temporal logic formulas. Second, we train a library of neural networks offline and combine a subset of the trained NNs into a single NN-based planner at runtime when a task is revealed. In particular, we develop a novel constrained NN training procedure, named formal NN training, to enforce that each neural network in the library represents a "symbol" in the symbolic model. As a result, our neurosymbolic framework enjoys the scalability and flexibility benefits of machine learning and inherits the provable guarantees from control-theoretic and formal-methods techniques. We demonstrate the effectiveness of our framework in both simulations and on an actual robotic vehicle, and show that our framework can generalize to unknown tasks where state-of-the-art meta-reinforcement learning techniques fail.