 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Enhanced Belief Propagation for Data Association in Multiobject Tracking
Paper and Code
Mar 26, 2022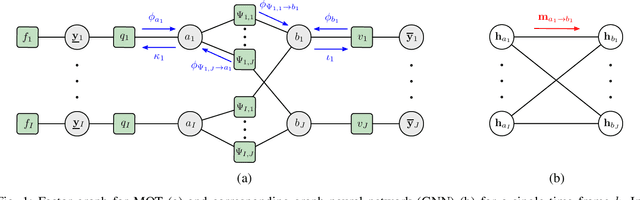

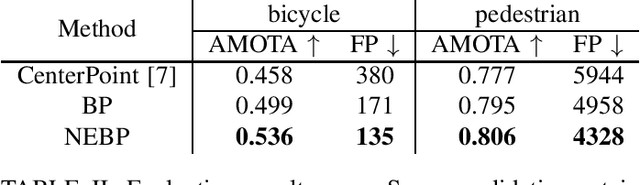
Situation-aware technologies enabled by multiobject tracking (MOT) methods will create new services and applications in fields such as autonomous navigation and applied ocean sciences. Belief propagation (BP) is a state-of-the-art method for Bayesian MOT but fully relies on a statistical model and preprocessed sensor measurements. In this paper, we establish a hybrid method for model-based and data-driven MOT. The proposed neural enhanced belief propagation (NEBP) approach complements BP by information learned from raw sensor data with the goal to improve data association and to reject false alarm measurements. We evaluate the performance of our NEBP approach for MOT on the nuScenes autonomous driving dataset and demonstrate that it can outperform state-of-the-art reference methods.