 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuFlow: Real-time, High-accuracy Optical Flow Estimation on Robots Using Edge Devices
Paper and Code
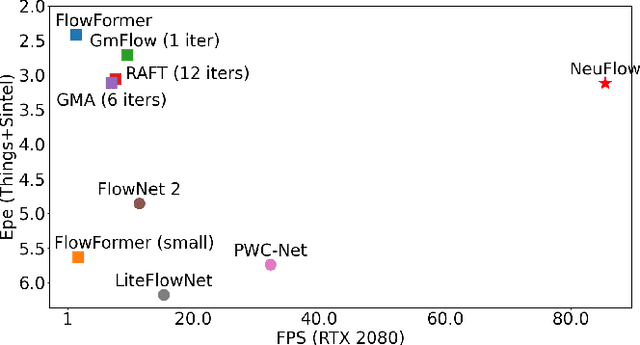

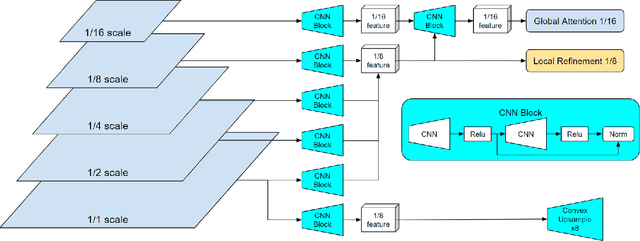
Real-time high-accuracy optical flow estimation is a crucial component in various applications, including localization and mapping in robotics, object tracking, and activity recognition in computer vision. While recent learning-based optical flow methods have achieved high accuracy, they often come with heavy computation costs. In this paper, we propose a highly efficient optical flow architecture, called NeuFlow, that addresses both high accuracy and computational cost concerns. The architecture follows a global-to-local scheme. Given the features of the input images extracted at different spatial resolutions, global matching is employed to estimate an initial optical flow on the 1/16 resolution, capturing large displacement, which is then refined on the 1/8 resolution with lightweight CNN layers for better accuracy. We evaluate our approach on Jetson Orin Nano and RTX 2080 to demonstrate efficiency improvements across different computing platforms. We achieve a notable 10x-80x speedup compared to several state-of-the-art methods, while maintaining comparable accuracy. Our approach achieves around 30 FPS on edge computing platforms, which represents a significant breakthrough in deploying complex computer vision tasks such as SLAM on small robots like drones. The full training and evaluation code is available at https://github.com/neufieldrobotics/NeuFlow.