 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNetwork Generalization Prediction for Safety Critical Tasks in Novel Operating Domains
Paper and Code
Aug 17, 2021

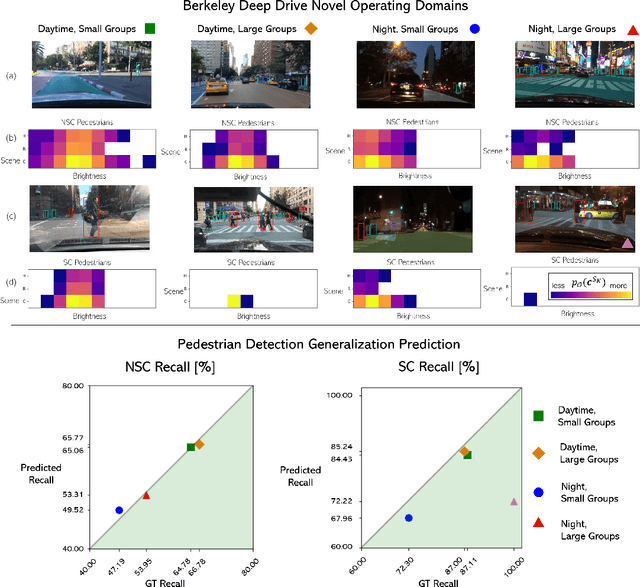
It is well known that Neural Network (network) performance often degrades when a network is used in novel operating domains that differ from its training and testing domains. This is a major limitation, as networks are being integrated into safety critical, cyber-physical systems that must work in unconstrained environments, e.g., perception for autonomous vehicles. Training networks that generalize to novel operating domains and that extract robust features is an active area of research, but previous work fails to predict what the network performance will be in novel operating domains. We propose the task Network Generalization Prediction: predicting the expected network performance in novel operating domains. We describe the network performance in terms of an interpretable Context Subspace, and we propose a methodology for selecting the features of the Context Subspace that provide the most information about the network performance. We identify the Context Subspace for a pretrained Faster RCNN network performing pedestrian detection on the Berkeley Deep Drive (BDD) Dataset, and demonstrate Network Generalization Prediction accuracy within 5% or less of observed performance. We also demonstrate that the Context Subspace from the BDD Dataset is informative for completely unseen datasets, JAAD and Cityscapes, where predictions have a bias of 10% or less.