 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNear-optimal control of dynamical systems with neural ordinary differential equations
Paper and Code
Jun 22, 2022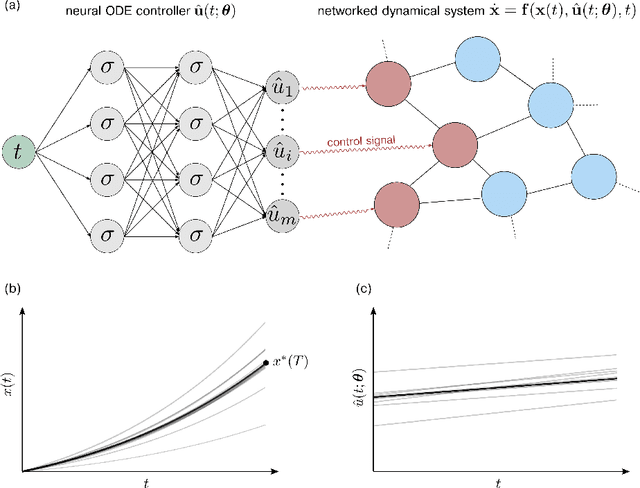

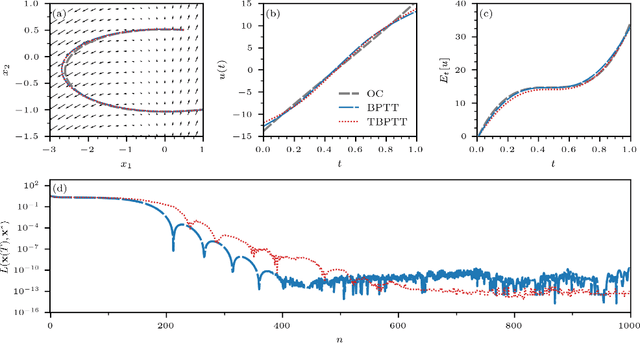
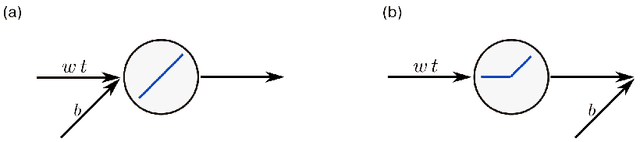
Optimal control problems naturally arise in many scientific applications where one wishes to steer a dynamical system from a certain initial state $\mathbf{x}_0$ to a desired target state $\mathbf{x}^*$ in finite time $T$. Recent advances in deep learning and neural network-based optimization have contributed to the development of methods that can help solve control problems involving high-dimensional dynamical systems. In particular, the framework of neural ordinary differential equations (neural ODEs) provides an efficient means to iteratively approximate continuous time control functions associated with analytically intractable and computationally demanding control tasks. Although neural ODE controllers have shown great potential in solving complex control problems, the understanding of the effects of hyperparameters such as network structure and optimizers on learning performance is still very limited. Our work aims at addressing some of these knowledge gaps to conduct efficient hyperparameter optimization. To this end, we first analyze how truncated and non-truncated backpropagation through time affect runtime performance and the ability of neural networks to learn optimal control functions. Using analytical and numerical methods, we then study the role of parameter initializations, optimizers, and neural-network architecture. Finally, we connect our results to the ability of neural ODE controllers to implicitly regularize control energy.