 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNavigating Dimensionality through State Machines in Automotive System Validation
Paper and Code
Aug 20, 2024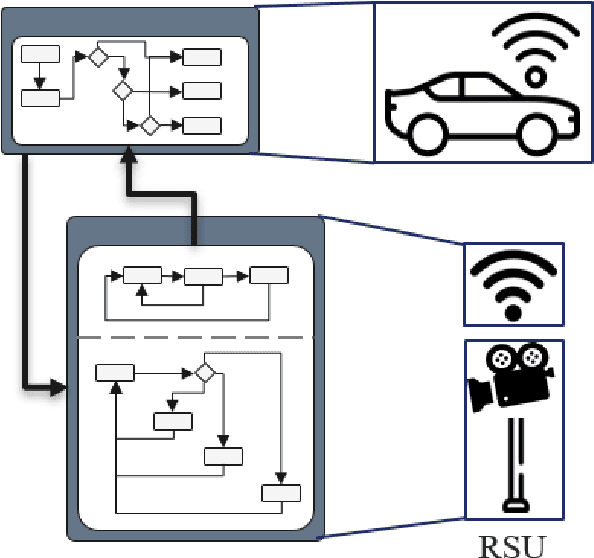
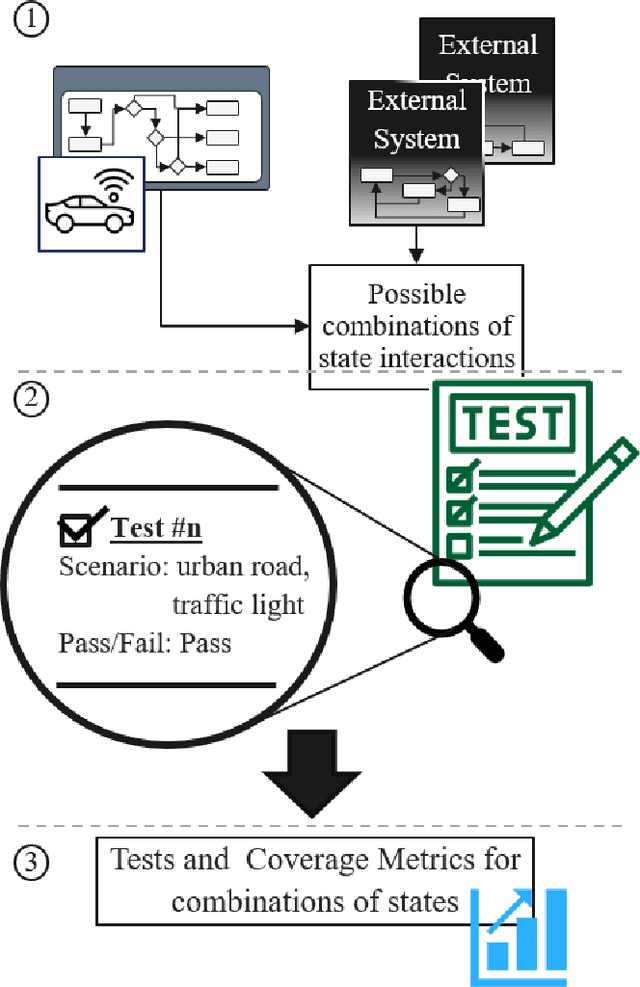
The increasing automation of vehicles is resulting in the integration of more extensive in-vehicle sensor systems, electronic control units, and software. Additionally, vehicle-to-everything communication is seen as an opportunity to extend automated driving capabilities through information from a source outside the ego vehicle. However, the validation and verification of automated driving functions already pose a challenge due to the number of possible scenarios that can occur for a driving function, which makes it difficult to achieve comprehensive test coverage. Currently, the establishment of Safety Of The Intended Functionality ( SOTIF ) mandates the implementation of scenario-based testing. The introduction of additional external systems through vehicle-to-everything further complicates the problem and increases the scenario space. In this paper, a methodology based on state charts is proposed for modeling the interaction with external systems, which may remain as black boxes. This approach leverages the testability and coverage analysis inherent in state charts by combining them with scenario-based testing. The overall objective is to reduce the space of scenarios necessary for testing a networked driving function and to streamline validation and verification. The utilization of this approach is demonstrated using a simulated signalized intersection with a roadside unit that detects vulnerable road users.