 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMutual-Information Regularization in Markov Decision Processes and Actor-Critic Learning
Paper and Code
Sep 11, 2019
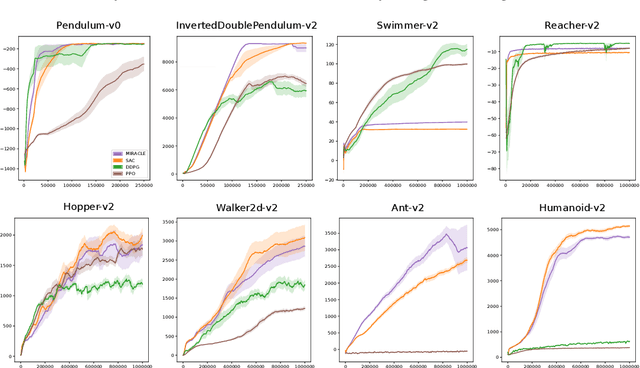


Cumulative entropy regularization introduces a regulatory signal to the reinforcement learning (RL) problem that encourages policies with high-entropy actions, which is equivalent to enforcing small deviations from a uniform reference marginal policy. This has been shown to improve exploration and robustness, and it tackles the value overestimation problem. It also leads to a significant performance increase in tabular and high-dimensional settings, as demonstrated via algorithms such as soft Q-learning (SQL) and soft actor-critic (SAC). Cumulative entropy regularization has been extended to optimize over the reference marginal policy instead of keeping it fixed, yielding a regularization that minimizes the mutual information between states and actions. While this has been initially proposed for Markov Decision Processes (MDPs) in tabular settings, it was recently shown that a similar principle leads to significant improvements over vanilla SQL in RL for high-dimensional domains with discrete actions and function approximators. Here, we follow the motivation of mutual-information regularization from an inference perspective and theoretically analyze the corresponding Bellman operator. Inspired by this Bellman operator, we devise a novel mutual-information regularized actor-critic learning (MIRACLE) algorithm for continuous action spaces that optimizes over the reference marginal policy. We empirically validate MIRACLE in the Mujoco robotics simulator, where we demonstrate that it can compete with contemporary RL methods. Most notably, it can improve over the model-free state-of-the-art SAC algorithm which implicitly assumes a fixed reference policy.