Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultistream ValidNet: Improving 6D Object Pose Estimation by Automatic Multistream Validation
Paper and Code
Jun 12, 2021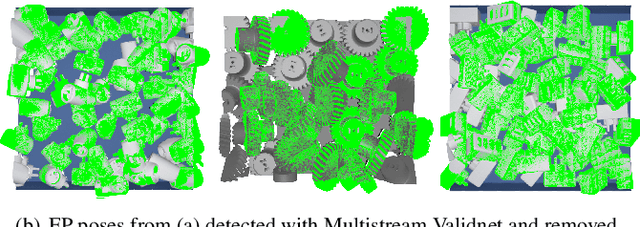

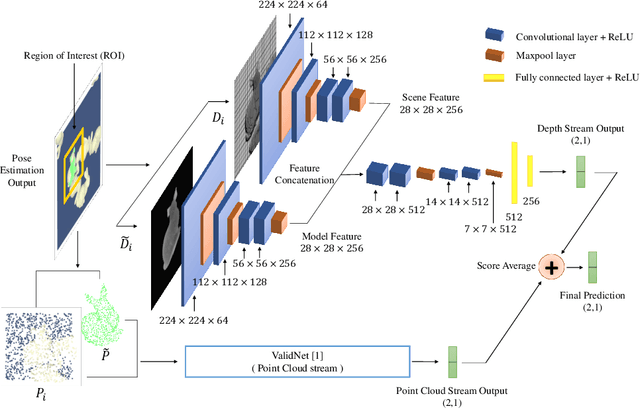

This work presents a novel approach to improve the results of pose estimation by detecting and distinguishing between the occurrence of True and False Positive results. It achieves this by training a binary classifier on the output of an arbitrary pose estimation algorithm, and returns a binary label indicating the validity of the result. We demonstrate that our approach improves upon a state-of-the-art pose estimation result on the Sil\'eane dataset, outperforming a variation of the alternative CullNet method by 4.15% in average class accuracy and 0.73% in overall accuracy at validation. Applying our method can also improve the pose estimation average precision results of Op-Net by 6.06% on average.
* 6 pages, 2 figures, 2 tables. To appear in the proceedings of the
28th IEEE International Conference on Image Processing (IEEE - ICIP),
September 19-22, 2021, Anchorage, Alaska, USA
View paper on