 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-UAV Coverage Path Planning for the Inspection of Large and Complex Structures
Paper and Code
Jul 26, 2020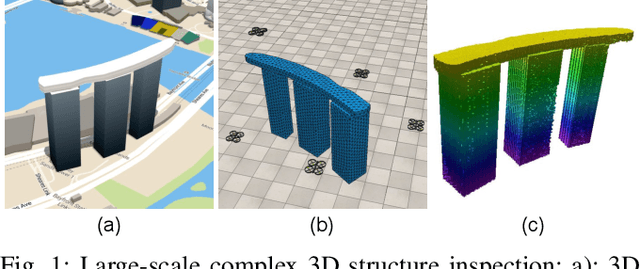
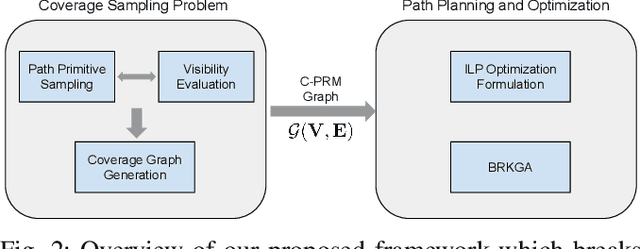
We present a multi-UAV Coverage Path Planning (CPP) framework for the inspection of large-scale, complex 3D structures. In the proposed sampling-based coverage path planning method, we formulate the multi-UAV inspection applications as a multi-agent coverage path planning problem. By combining two NP-hard problems: Set Covering Problem (SCP) and Vehicle Routing Problem (VRP), a Set-Covering Vehicle Routing Problem (SC-VRP) is formulated and subsequently solved by a modified Biased Random Key Genetic Algorithm (BRKGA) with novel, efficient encoding strategies and local improvement heuristics. We test our proposed method for several complex 3D structures with the 3D model extracted from OpenStreetMap. The proposed method outperforms previous methods, by reducing the length of the planned inspection path by up to 48%