 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Tones' Phase Coding of Interaural Time Difference by Spiking Neural Network
Paper and Code
Jul 07, 2020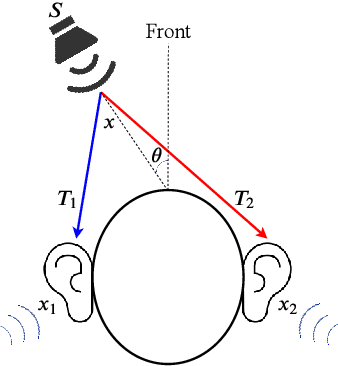
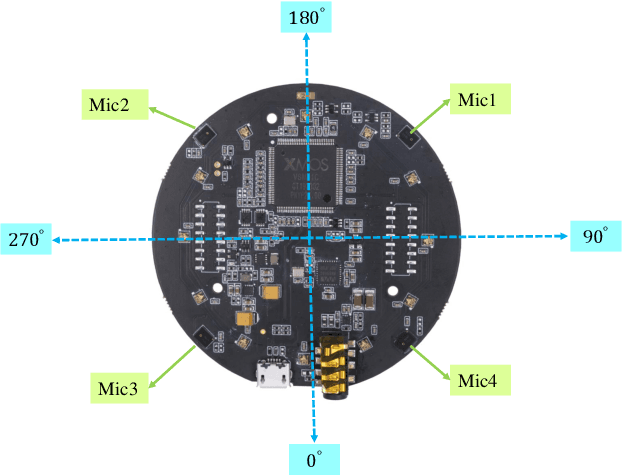
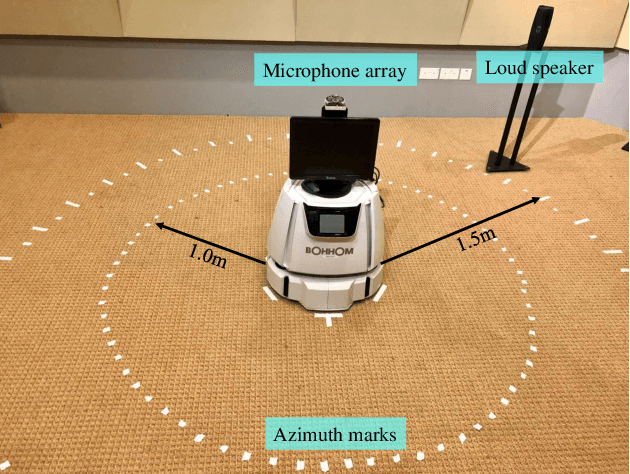
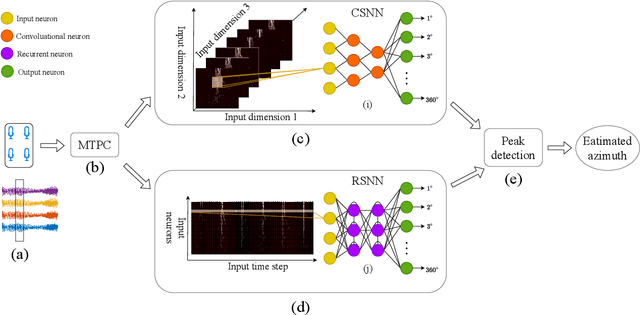
Inspired by the mammal's auditory localization pathway, in this paper we propose a pure spiking neural network (SNN) based computational model for precise sound localization in the noisy real-world environment, and implement this algorithm in a real-time robotic system with a microphone array. The key of this model relies on the MTPC scheme, which encodes the interaural time difference (ITD) cues into spike patterns. This scheme naturally follows the functional structures of the human auditory localization system, rather than artificially computing of time difference of arrival. Besides, it highlights the advantages of SNN, such as event-driven and power efficiency. The MTPC is pipelined with two different SNN architectures, the convolutional SNN and recurrent SNN, by which it shows the applicability to various SNNs. This proposal is evaluated by the microphone collected location-dependent acoustic data, in a real-world environment with noise, obstruction, reflection, or other affects. The experiment results show a mean error azimuth of 1~3 degrees, which surpasses the accuracy of the other biologically plausible neuromorphic approach for sound source localization.