 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Start n-Dimensional Lattice Planning with Optimal Motion Primitives
Paper and Code
Jul 23, 2021
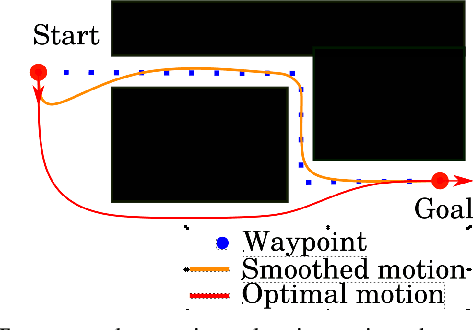
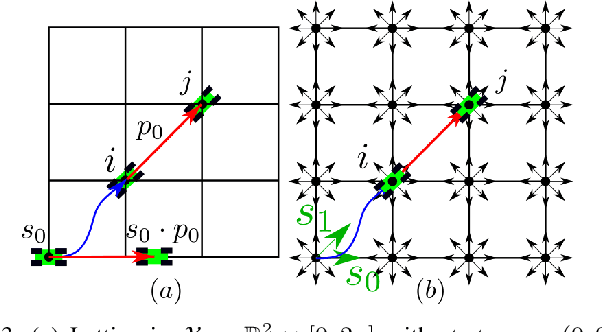

In the field of motion planning the use of pre-computed, feasible, locally optimal motions called motion primitives can not only increase the quality of motions, but decrease the computation time required to develop these motions. In this work we extend the results of our earlier work by developing a technique for computing primitives for a lattice that admits higher-order states like curvature, velocity, and acceleration. The technique involves computing a minimal set of motion primitives that $t$-span a configuration space lattice. A set of motion primitives $t$-span a lattice if, given a real number $t$ greater or equal to one, any configuration in the lattice can be reached via a sequence of motion primitives whose cost is no more than $t$ times the cost of the optimal path to that configuration. While motion primitives computed in this way could be used with any graph search algorithm to develop a motion, this paper also proposes one such algorithm which works well in practice in both short complex maneuvers and longer maneuvers. Finally, this paper proposes a shortcut-based smoothing algorithm based on shortest path planning in directed acyclic graphs.