 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Resolution A*
Paper and Code
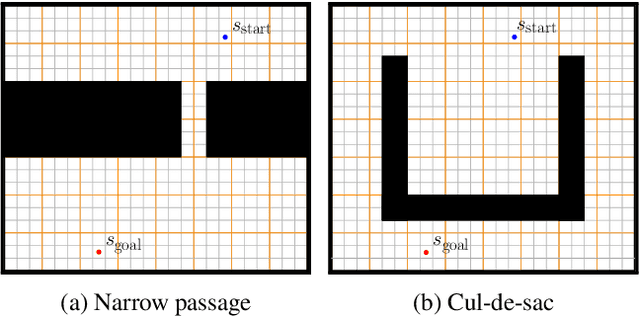
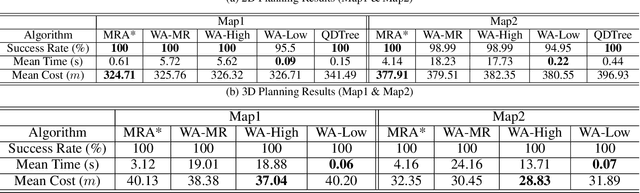

Heuristic search-based planning techniques are commonly used for motion planning on discretized spaces. The performance of these algorithms is heavily affected by the resolution at which the search space is discretized. Typically a fixed resolution is chosen for a given domain. While a finer resolution allows for better maneuverability, it significantly increases the size of the state space, and hence demands more search efforts. On the contrary, a coarser resolution gives a fast exploratory behavior but compromises on maneuverability and the completeness of the search. To effectively leverage the advantages of both high and low resolution discretizations, we propose Multi-Resolution A* (MRA*) algorithm, that runs multiple weighted-A*(WA*) searches having different resolution levels simultaneously and combines the strengths of all of them. In addition to these searches, MRA* uses one anchor search to control expansions from these searches. We show that MRA* is bounded suboptimal with respect to the anchor resolution search space and resolution complete. We performed experiments on several motion planning domains including 2D, 3D grid planning and 7 DOF manipulation planning and compared our approach with several search-based and sampling-based baselines.