 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Object Self-Supervised Depth Denoising
Paper and Code
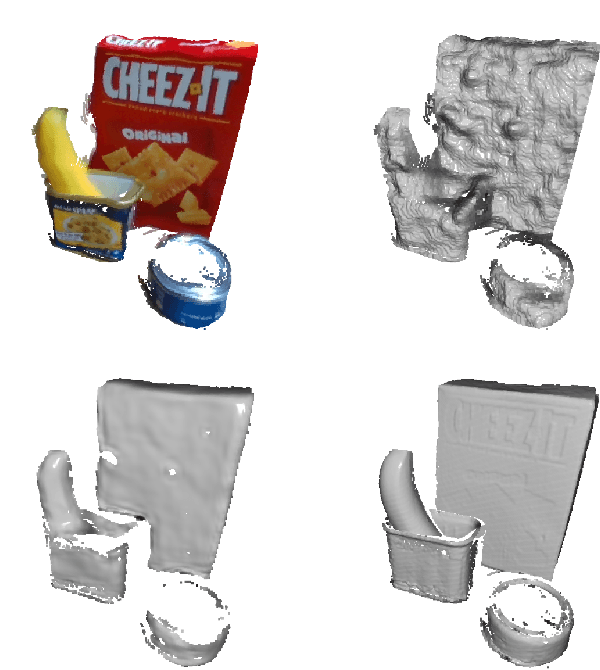

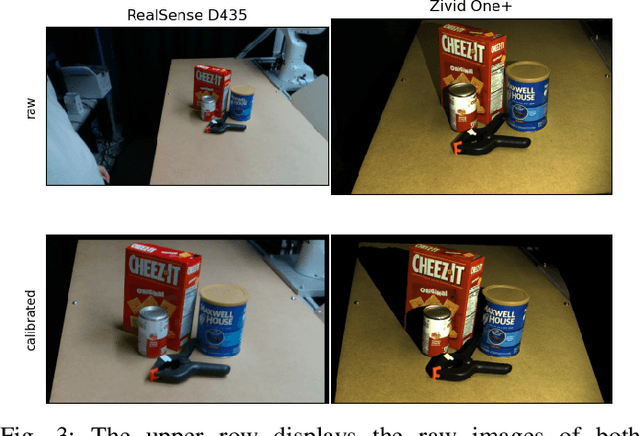

Depth cameras are frequently used in robotic manipulation, e.g. for visual servoing. The quality of small and compact depth cameras is though often not sufficient for depth reconstruction, which is required for precise tracking in and perception of the robot's working space. Based on the work of Shabanov et al. (2021), in this work, we present a self-supervised multi-object depth denoising pipeline, that uses depth maps of higher-quality sensors as close-to-ground-truth supervisory signals to denoise depth maps coming from a lower-quality sensor. We display a computationally efficient way to align sets of two frame pairs in space and retrieve a frame-based multi-object mask, in order to receive a clean labeled dataset to train a denoising neural network on. The implementation of our presented work can be found at https://github.com/alr-internship/self-supervised-depth-denoising.