 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti Camera Placement via Z-buffer Rendering for the Optimization of the Coverage and the Visual Hull
Paper and Code
Mar 20, 2021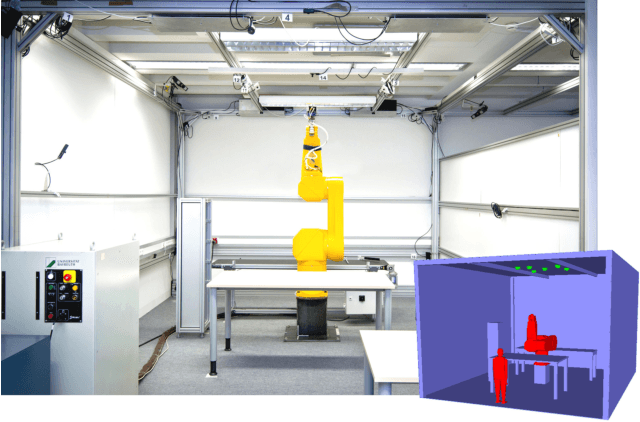
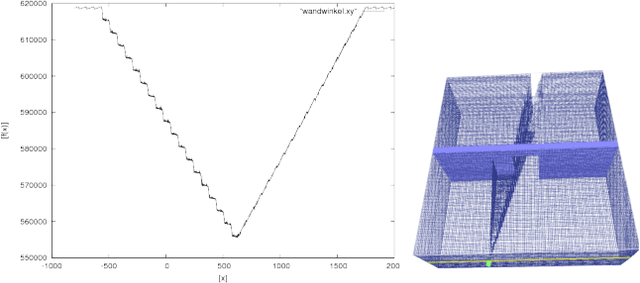
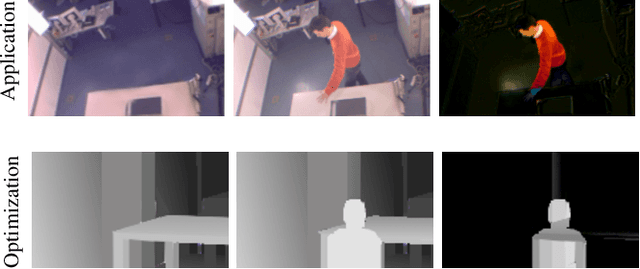
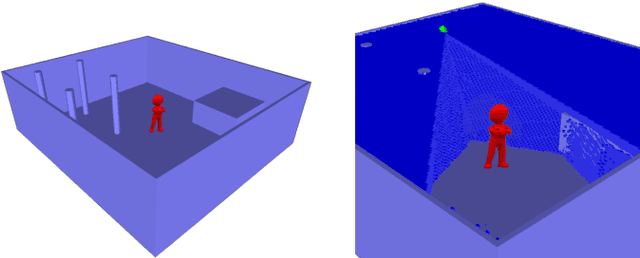
We can only allow human-robot-cooperation in a common work cell if the human integrity is guaranteed. A surveillance system with multiple cameras can detect collisions without contact to the human collaborator. A failure safe system needs to optimally cover the important areas of the robot work cell with safety overlap. We propose an efficient algorithm for optimally placing and orienting the cameras in a 3D CAD model of the work cell. In order to evaluate the quality of the camera constellation in each step, our method simulates the vision system using a z-buffer rendering technique for image acquisition, a voxel space for the overlap and a refined visual hull method for a conservative human reconstruction. The simulation allows to evaluate the quality with respect to the distortion of images and advanced image analysis in the presence of static and dynamic visual obstacles such as tables, racks, walls, robots and people. Our method is ideally suited for maximizing the coverage of multiple cameras or minimizing an error made by the visual hull and can be extended to probabilistic space carving.