 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Shape Control with Optimal Transport
Paper and Code
Jun 30, 2022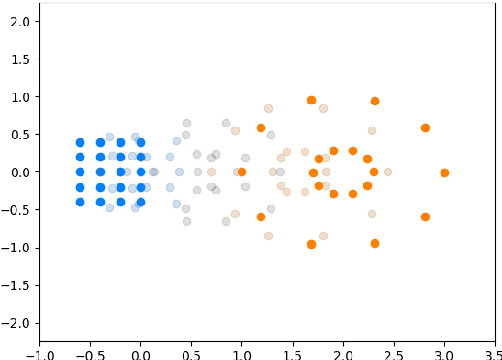
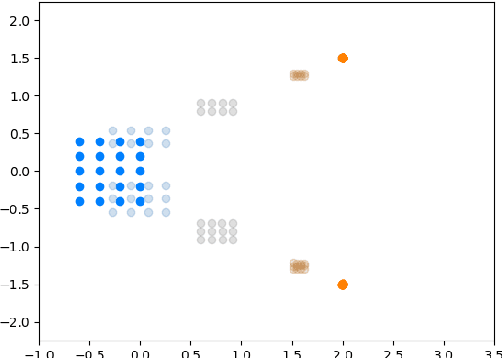
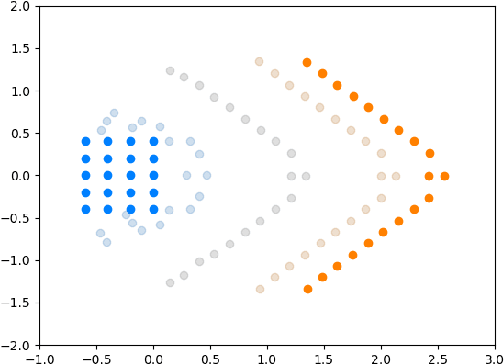
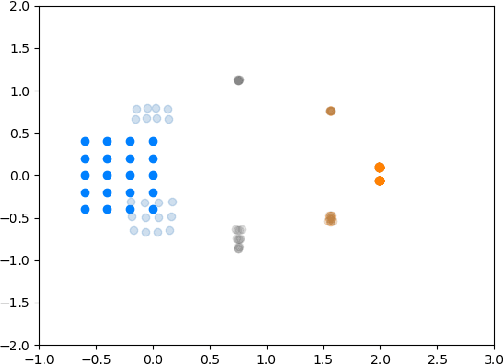
We introduce a method called MASCOT (Multi-Agent Shape Control with Optimal Transport) to compute optimal control solutions of agents with shape/formation/density constraints. For example, we might want to apply shape constraints on the agents -- perhaps we desire the agents to hold a particular shape along the path, or we want agents to spread out in order to minimize collisions. We might also want a proportion of agents to move to one destination, while the other agents move to another, and to do this in the optimal way, i.e. the source-destination assignments should be optimal. In order to achieve this, we utilize the Earth Mover's Distance from Optimal Transport to distribute the agents into their proper positions so that certain shapes can be satisfied. This cost is both introduced in the terminal cost and in the running cost of the optimal control problem.