 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMOTS R-CNN: Cosine-margin-triplet loss for multi-object tracking
Paper and Code
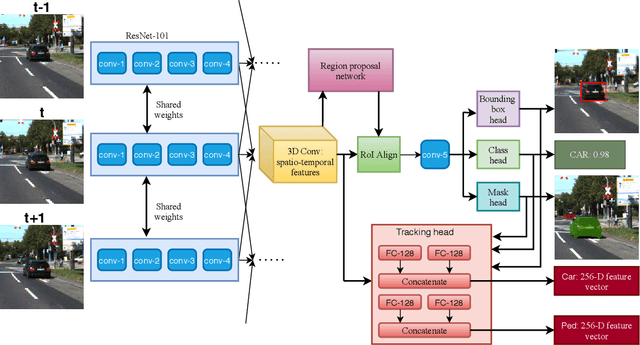


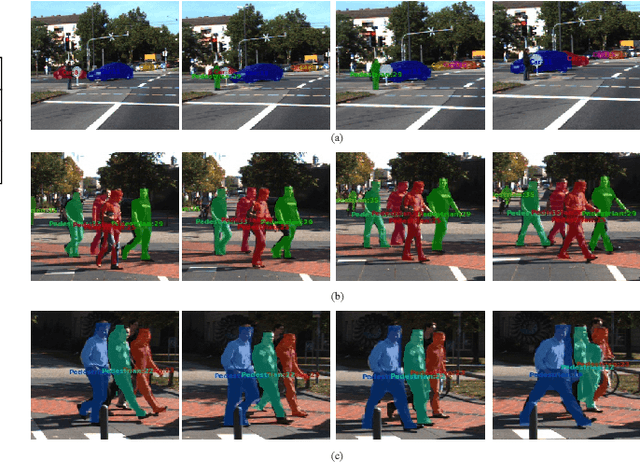
One of the central tasks of multi-object tracking involves learning a distance metric that is consistent with the semantic similarities of objects. The design of an appropriate loss function that encourages discriminative feature learning is among the most crucial challenges in deep neural network-based metric learning. Despite significant progress, slow convergence and a poor local optimum of the existing contrastive and triplet loss based deep metric learning methods necessitates a better solution. In this paper, we propose cosine-margin-contrastive (CMC) and cosine-margin-triplet (CMT) loss by reformulating both contrastive and triplet loss functions from the perspective of cosine distance. The proposed reformulation as a cosine loss is achieved by feature normalization which distributes the learned features on a hypersphere. We then propose the MOTS R-CNN framework for joint multi-object tracking and segmentation, particularly targeted at improving the tracking performance. Specifically, the tracking problem is addressed through deep metric learning based on the proposed loss functions. We propose a scale-invariant tracking by using a multi-layer feature aggregation scheme to make the model robust against object scale variations and occlusions. The MOTS R-CNN achieves the state-of-the-art tracking performance on the KITTI MOTS dataset. We show that the MOTS R-CNN reduces the identity switching by $62\%$ and $61\%$ on cars and pedestrians, respectively in comparison to Track R-CNN.