 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Priority Optimization Framework towards Automated and Teleoperated Robot Cooperation in Industrial Recovery Scenarios
Paper and Code
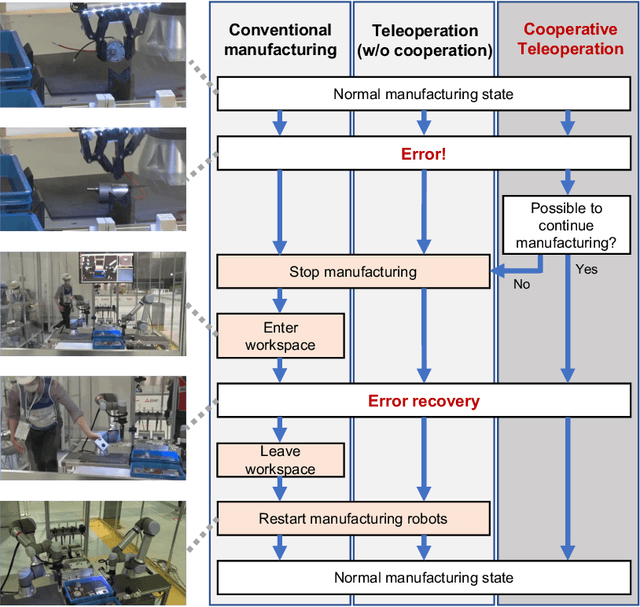
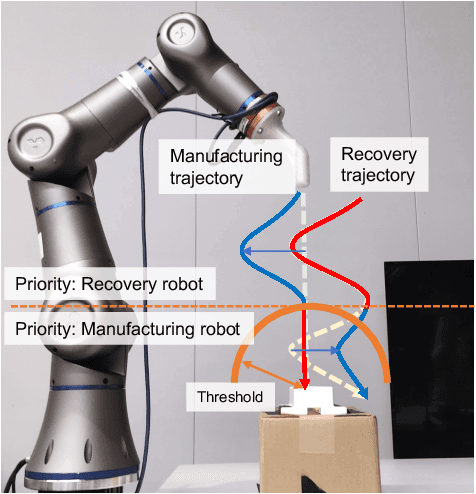
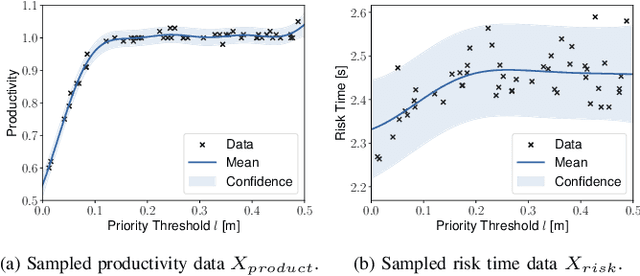
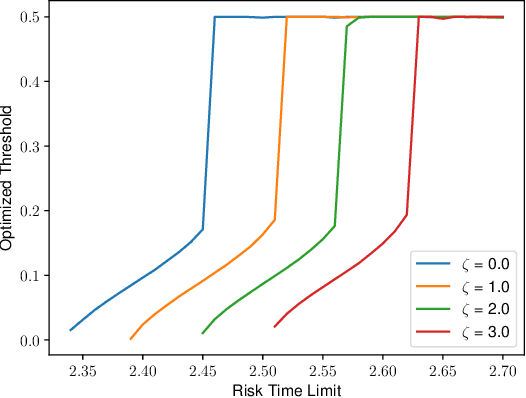
In this study, we present an optimization framework for efficient motion priority design between automated and teleoperated robots in an industrial recovery scenario. Although robots have recently become increasingly common in industrial sites, there are still challenges in achieving human-robot collaboration/cooperation (HRC), where human workers and robots are engaged in collaborative and cooperative tasks in a shared workspace. For example, the corresponding factory cell must be suspended for safety when an industrial robot drops an assembling part in the workspace. After that, a human worker is allowed to enter the robot workspace to address the robot recovery. This process causes non-continuous manufacturing, which leads to a productivity reduction. Recently, robotic teleoperation technology has emerged as a promising solution to enable people to perform tasks remotely and safely. This technology can be used in the recovery process in manufacturing failure scenarios. Our proposition involves the design of an appropriate priority function that aids in collision avoidance between the manufacturing and recovery robots and facilitates continuous processes with minimal production loss within an acceptable risk level. This paper presents a framework, including an HRC simulator and an optimization formulation, for finding optimal parameters of the priority function. Through quantitative and qualitative experiments, we address the proof of our novel concept and demonstrate its feasibility.