 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion control for autonomous heterogeneous multi-agent area search in uncertain conditions
Paper and Code
Nov 20, 2019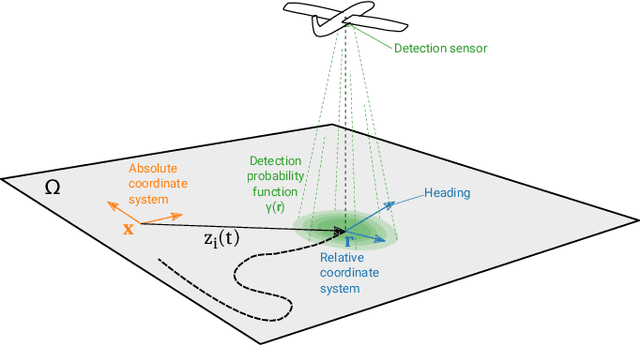
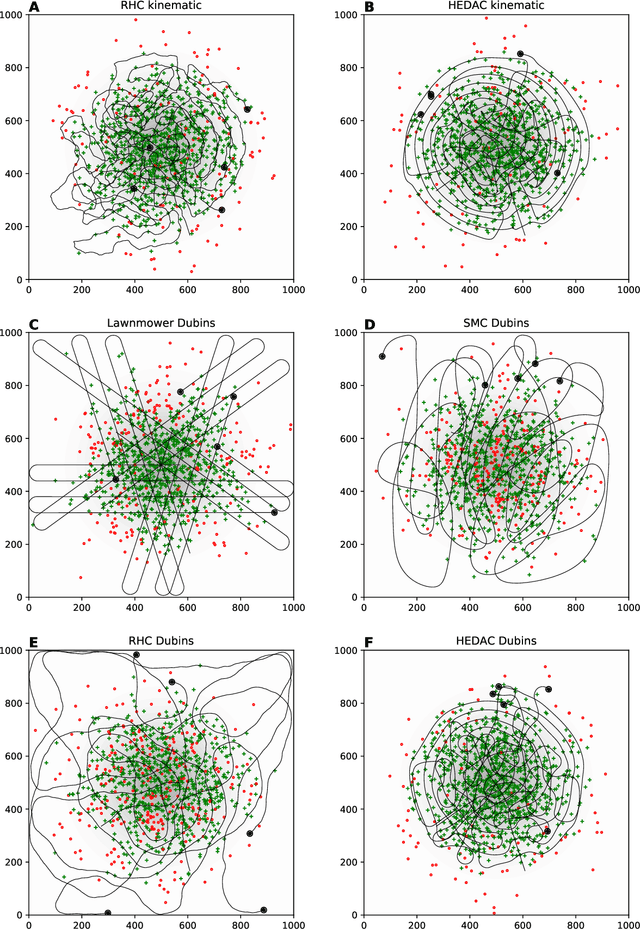
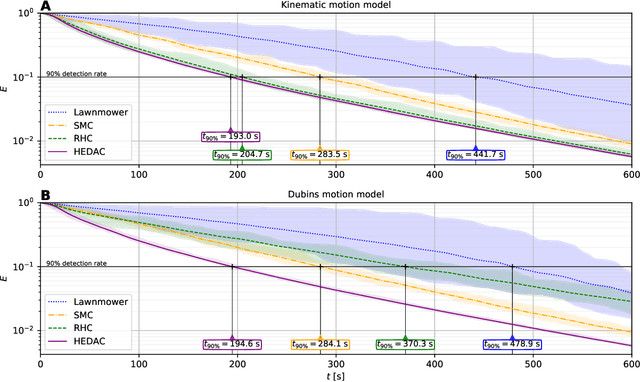

Using multiple mobile robots in search missions offers a lot of benefits, but one needs a suitable and competent motion control algorithm which is able to consider sensors characteristics, the uncertainty of target detection and complexity of needed maneuvers in order to make a multi-agent search autonomous. This paper provides a methodology for an autonomous two-dimensional search using multiple unmanned search agents. The proposed methodology relies on an accurate calculation of target occurrence probability distribution based on the initial estimated target distribution and continuous action of spatial variant search agent sensors. The core of the autonomous search process is a high-level motion control for multiple search agents which utilizes the probabilistic model of target occurrence via Heat Equation Driven Area Coverage (HEDAC) method. This centralized motion control algorithm is tailored for handling a group of search agents which are heterogeneous in both motion and sensing characteristics. The motion of agents is directed by the gradient of the potential field which provides near-ergodic exploration of the search space. The proposed method is tested on three realistic search mission simulations and compared with three alternative methods, where HEDAC outperforms all alternatives in all tests. Conventional search strategies need about double the time to achieve proportionate detection rate when compared to HEDAC controlled search. The scalability test showed that increasing the number of HEDAC controlled search agents, although somewhat deteriorating the search efficiency, provides needed speed-up of the search. This study shows the flexibility and competence of the proposed method and gives a strong foundation for possible real-world applications.