Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMorphological Wobbling Can Help Robots Learn
Paper and Code
May 05, 2022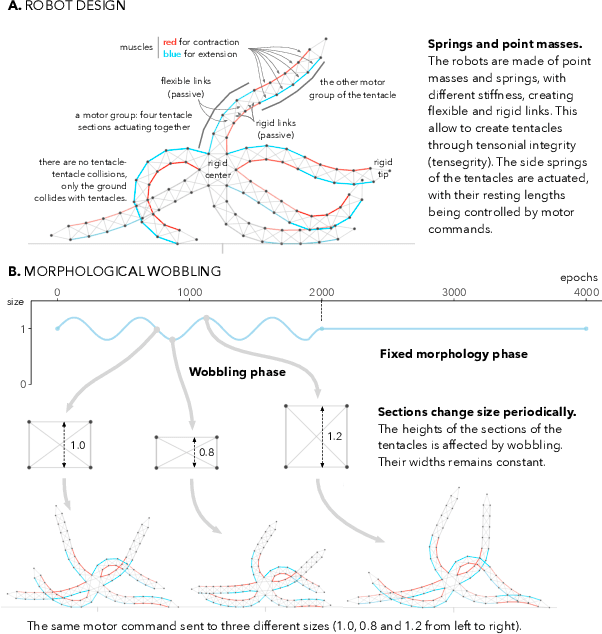
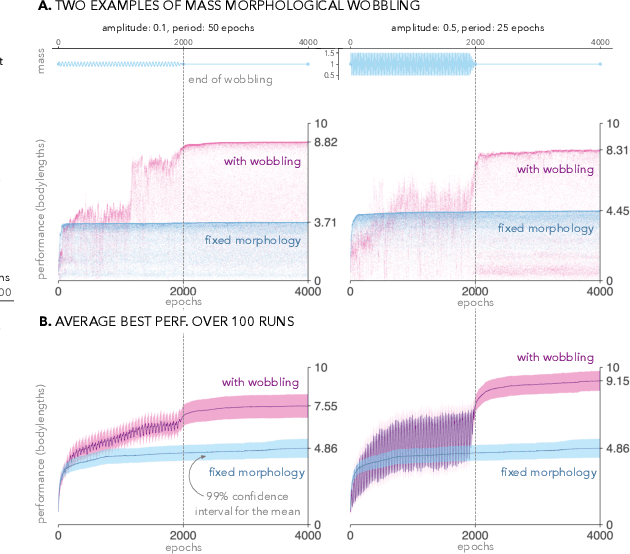
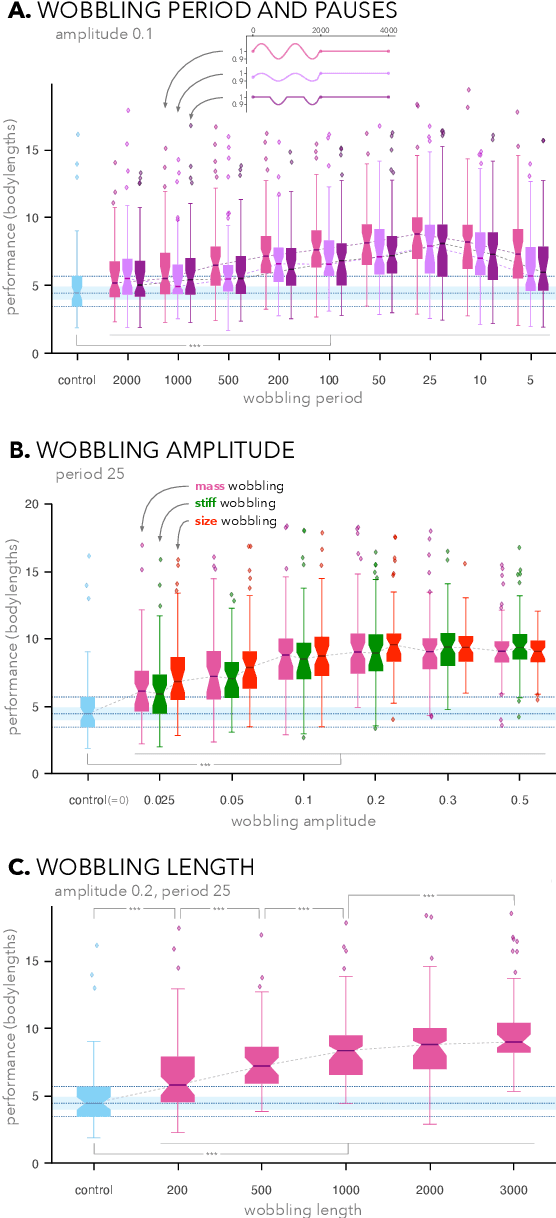
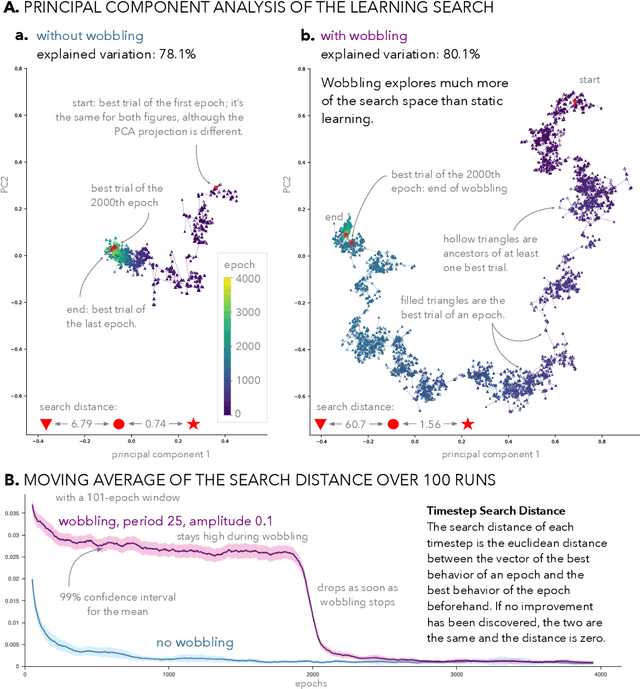
We propose to make the physical characteristics of a robot oscillate while it learns to improve its behavioral performance. We consider quantities such as mass, actuator strength, and size that are usually fixed in a robot, and show that when those quantities oscillate at the beginning of the learning process on a simulated 2D soft robot, the performance on a locomotion task can be significantly improved. We investigate the dynamics of the phenomenon and conclude that in our case, surprisingly, a high-frequency oscillation with a large amplitude for a large portion of the learning duration leads to the highest performance benefits. Furthermore, we show that morphological wobbling significantly increases exploration of the search space.
View paper on