 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMomentum-Aware Trajectory Optimization and Control for Agile Quadrupedal Locomotion
Paper and Code
Mar 03, 2022
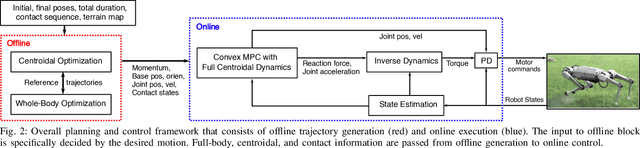
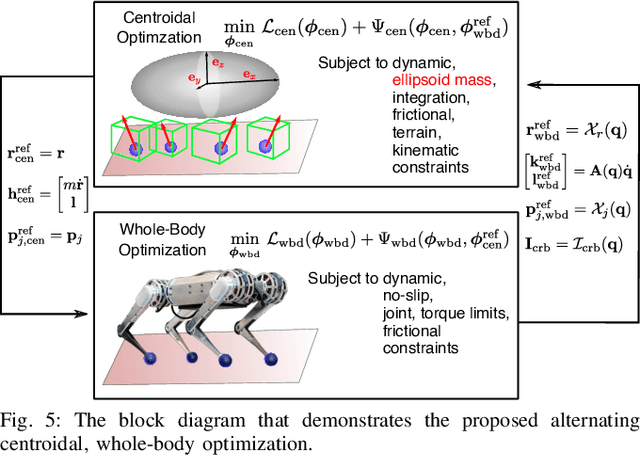
In this paper, we present a versatile hierarchical offline planning algorithm, along with and an online control pipeline for agile quadrupedal locomotion. Our offline planner alternates between optimizing centroidal dynamics for a reduced-order model and whole-body trajectory optimization, with the aim of achieving dynamics consensus. Our novel momentum-inertia-aware centroidal optimization, which uses an equimomental ellipsoid parameterization, is able to generate highly acrobatic motions via "inertia shaping". Our whole-body optimization approach significantly improves upon the quality of standard DDP-based approaches by iteratively exploiting feedback from the centroidal level. For online control, we have developed a novel linearization of the full centroidal dynamics, and incorporated these into a convex model predictive control scheme. Our controller can efficiently optimize for both contact forces and joint accelerations in single optimization, enabling more straightforward tracking for momentum-rich motions compared to existing quadrupedal MPC controllers. We demonstrate the capability and generality of our trajectory planner on four different dynamic maneuvers. We then present hardware experiments on the MIT Mini Cheetah platform to demonstrate performance of the entire planning and control pipeline on a twisting jump maneuver.