 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Multi-Rotors: From Quadrotors to Fully-Actuated Aerial Vehicles
Paper and Code
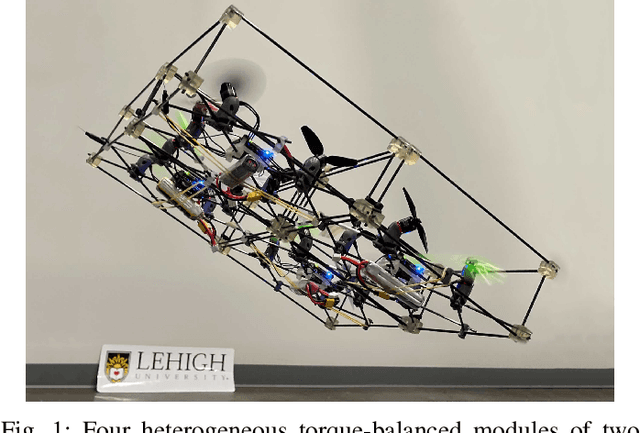
Traditional aerial vehicles have specific characteristics to perform specific tasks. For instance, in aerial transportation, the vehicles are limited with a maximum payload that cannot be extended to transport heavier objects. We propose a versatile modular robotic system that can increase its payload and controllable degrees of freedom by reconfiguring heterogeneous modules; we call it H-ModQuad. The system consists of cuboid modules, propelled by quadrotors with tilted propellers that can generate forces in different directions. We present two module designs with different actuation properties that enhance the capabilities of the assembled robot. By assembling different types of modules, H-ModQuad can increase its controllable degrees of freedom from 4 to 5 and 6 depending on its configuration. We model the modular vehicle and propose a general control strategy for all possible numbers of controllable degrees of freedom. We extend the concept of the actuation ellipsoid to find the best reference orientation that can maximize the performance of the structure. Our approach is validated with experiments using actual robots, showing that the structure can perform independent actuation for rotation and translation.