Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelling and Path Planning of Snake Robot in cluttered environment
Paper and Code
May 15, 2018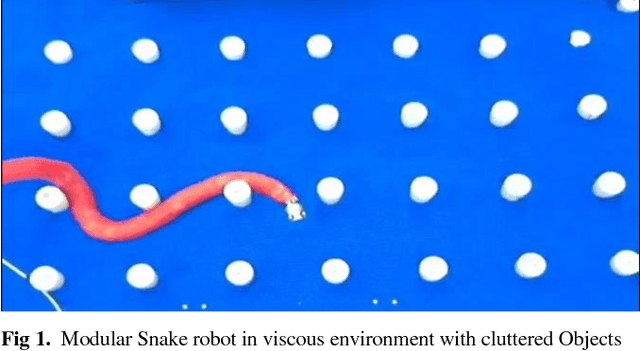
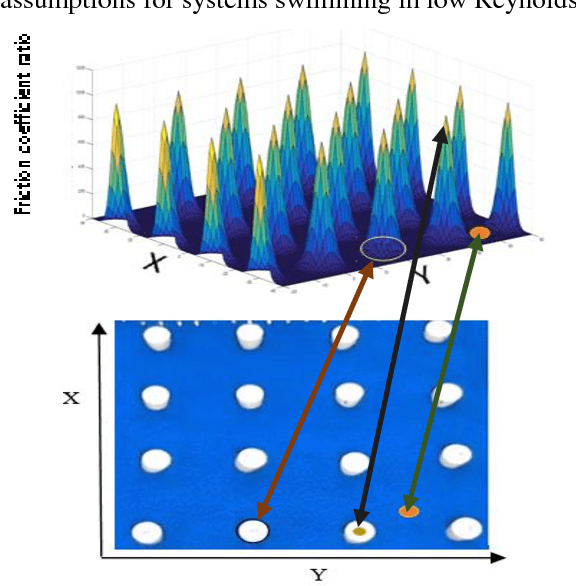
Studying snake robot locomotion in a cluttered environment has been a complicated task because the motion model is discontinuous due to the physical contact with obstacles, and the contact force cannot be determined solely by contact positions. We present a unique mathematical model of the robot interacting with obstacles in which the contact forces are mapped on the basis of a viscous friction model. Also a motion planning strategy has been introduced which helps deriving the simplest path that ensures sufficient number of contacts of the robot with the obstacles required to reach a goal position. Numerical simulations and experimental results are presented to validate the theoretical approach.
* Accepted in IEEE/INFToMM International Conference on Reconfigurable
Mechanisms and Robots 2018,Tu Delft
View paper on