 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Dependent Prosthesis Control with Real-Time Force Sensing
Paper and Code
May 24, 2021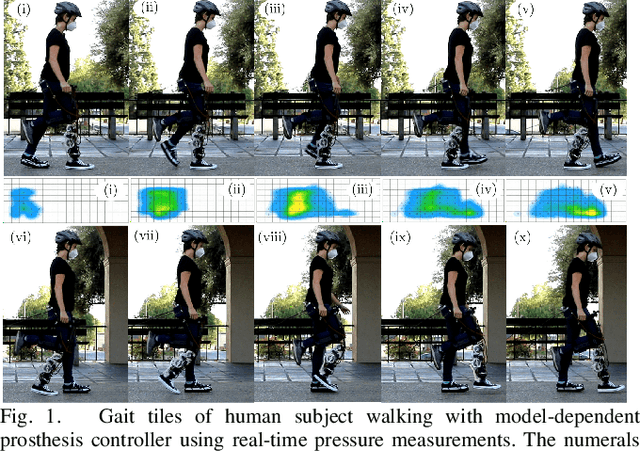
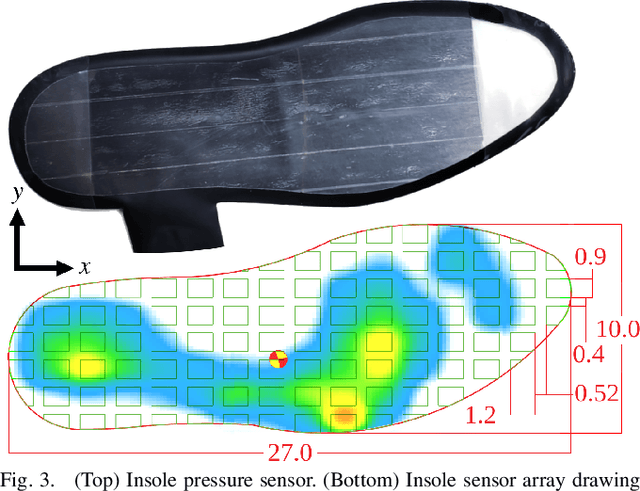

Lower-limb prosthesis wearers are more prone to fall than non-amputees. Powered prosthesis can reduce this instability of passive prostheses. While shown to be more stable in practice, powered prostheses generally use model-independent control methods that lack formal guarantees of stability and rely on heuristic tuning. Recent work overcame one of the limitations of model-based prosthesis control by developing a class of stable prosthesis subsystem controllers independent of the human model, except for its interaction forces with the prosthesis. Force sensors to measure these socket interaction forces as well as the ground reaction forces (GRFs) could introduce noise into the control loop making hardware implementation infeasible. This paper addresses part of this limitation by obtaining some of the GRFs through an insole pressure sensor. This paper achieves the first model-dependent prosthesis controller that uses in-the-loop on-board real-time force sensing, resulting in stable human-prosthesis walking and increasing the validity of our formal guarantees of stability.