Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Based Bayesian Reinforcement Learning in Large Structured Domains
Paper and Code
Jun 13, 2012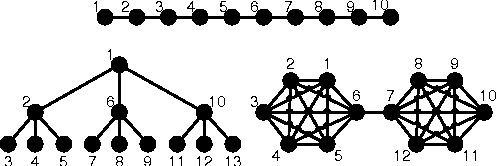
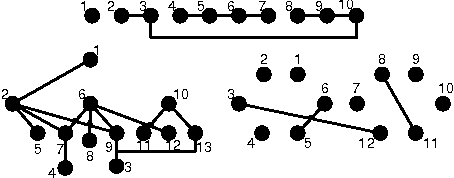
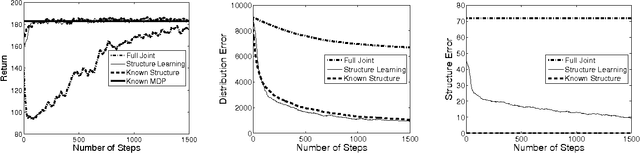
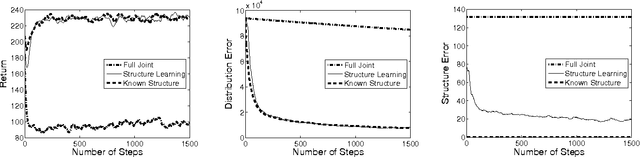
Model-based Bayesian reinforcement learning has generated significant interest in the AI community as it provides an elegant solution to the optimal exploration-exploitation tradeoff in classical reinforcement learning. Unfortunately, the applicability of this type of approach has been limited to small domains due to the high complexity of reasoning about the joint posterior over model parameters. In this paper, we consider the use of factored representations combined with online planning techniques, to improve scalability of these methods. The main contribution of this paper is a Bayesian framework for learning the structure and parameters of a dynamical system, while also simultaneously planning a (near-)optimal sequence of actions.
* Appears in Proceedings of the Twenty-Fourth Conference on Uncertainty
in Artificial Intelligence (UAI2008)
View paper on