 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMitigating Shadows in Lidar Scan Matching using Spherical Voxels
Paper and Code
Aug 01, 2022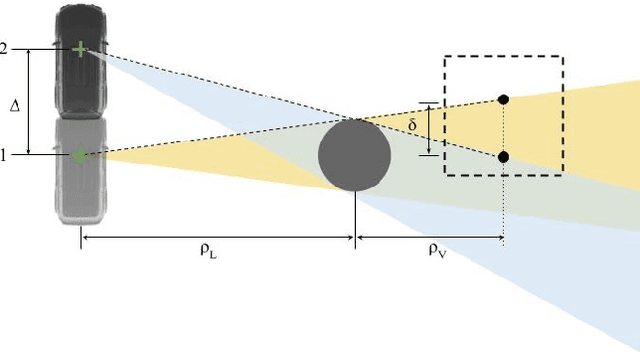
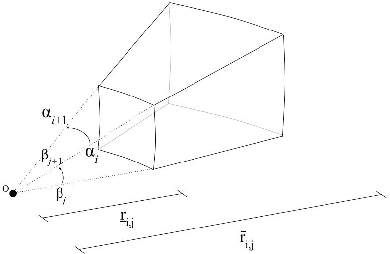
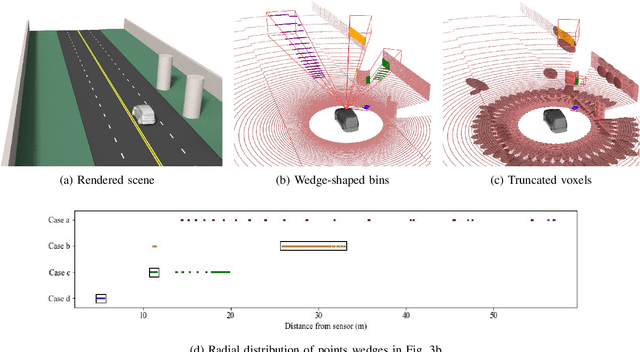
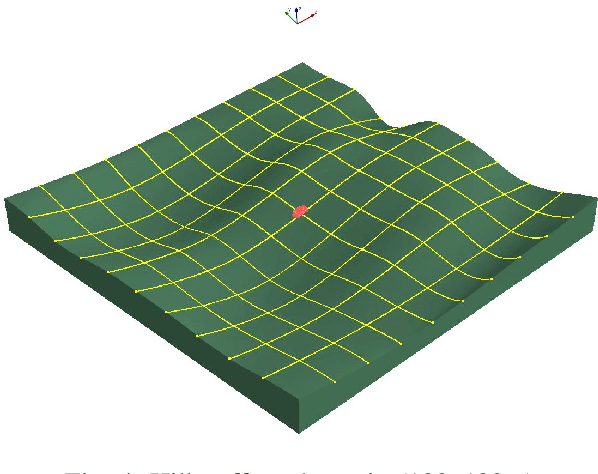
In this paper we propose an approach to mitigate shadowing errors in Lidar scan matching, by introducing a preprocessing step based on spherical gridding. Because the grid aligns with the Lidar beam, it is relatively easy to eliminate shadow edges which cause systematic errors in Lidar scan matching. As we show through simulation, our proposed algorithm provides better results than ground-plane removal, the most common existing strategy for shadow mitigation. Unlike ground plane removal, our method applies to arbitrary terrains (e.g. shadows on urban walls, shadows in hilly terrain) while retaining key Lidar points on the ground that are critical for estimating changes in height, pitch, and roll. Our preprocessing algorithm can be used with a range of scan-matching methods; however, for voxel-based scan matching methods, it provides additional benefits by reducing computation costs and more evenly distributing Lidar points among voxels.