 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMG-GAN: A Multi-Generator Model Preventing Out-of-Distribution Samples in Pedestrian Trajectory Prediction
Paper and Code
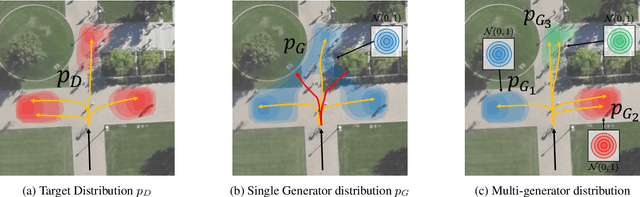
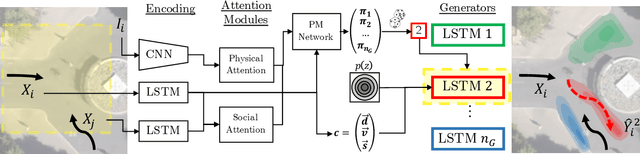
Pedestrian trajectory prediction is challenging due to its uncertain and multimodal nature. While generative adversarial networks can learn a distribution over future trajectories, they tend to predict out-of-distribution samples when the distribution of future trajectories is a mixture of multiple, possibly disconnected modes. To address this issue, we propose a multi-generator model for pedestrian trajectory prediction. Each generator specializes in learning a distribution over trajectories routing towards one of the primary modes in the scene, while a second network learns a categorical distribution over these generators, conditioned on the dynamics and scene input. This architecture allows us to effectively sample from specialized generators and to significantly reduce the out-of-distribution samples compared to single generator methods.