 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMean Spectral Normalization of Deep Neural Networks for Embedded Automation
Paper and Code
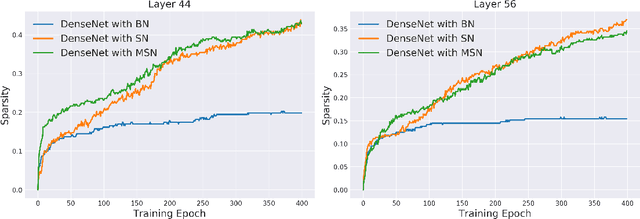



Deep Neural Networks (DNNs) have begun to thrive in the field of automation systems, owing to the recent advancements in standardising various aspects such as architecture, optimization techniques, and regularization. In this paper, we take a step towards a better understanding of Spectral Normalization (SN) and its potential for standardizing regularization of a wider range of Deep Learning models, following an empirical approach. We conduct several experiments to study their training dynamics, in comparison with the ubiquitous Batch Normalization (BN) and show that SN increases the gradient sparsity and controls the gradient variance. Furthermore, we show that SN suffers from a phenomenon, we call the mean-drift effect, which mitigates its performance. We, then, propose a weight reparameterization called as the Mean Spectral Normalization (MSN) to resolve the mean drift, thereby significantly improving the network's performance. Our model performs ~16% faster as compared to BN in practice, and has fewer trainable parameters. We also show the performance of our MSN for small, medium, and large CNNs - 3-layer CNN, VGG7 and DenseNet-BC, respectively - and unsupervised image generation tasks using Generative Adversarial Networks (GANs) to evaluate its applicability for a broad range of embedded automation tasks.