 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAPS-X: Explainable Multi-Robot Motion Planning via Segmentation
Paper and Code
Nov 02, 2020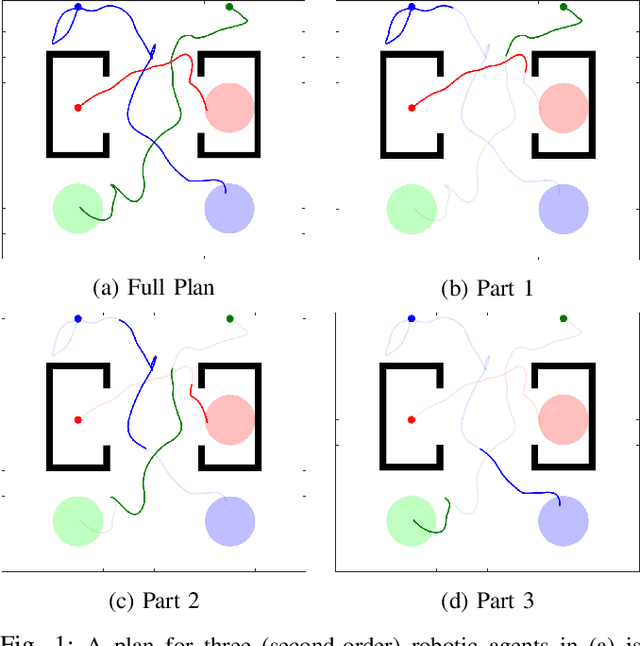
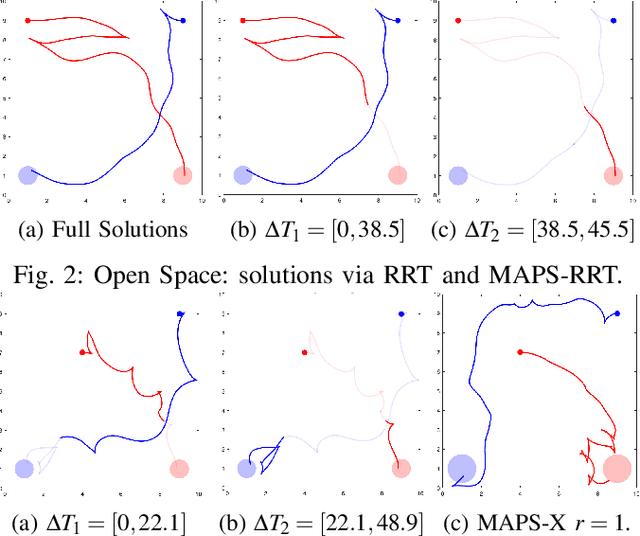
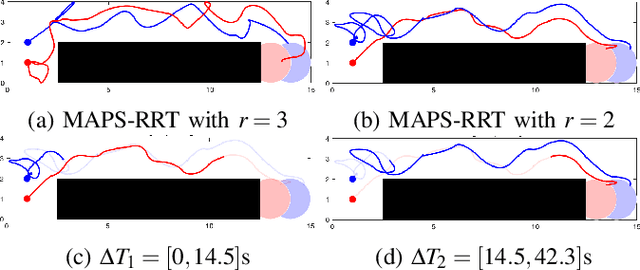
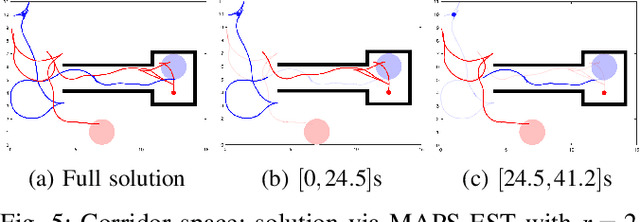
Traditional \textit{multi-robot motion planning} (MMP) focuses on computing trajectories for multiple robots acting in an environment, such that the robots do not collide when the trajectories are taken simultaneously. In \emph{safety-critical} applications, a human supervisor may want to verify that the plan is indeed collision-free. In this work, we propose a notion of explanation for a plan of MMP, based on visualization of the plan as a short sequence of images representing time segments, where in each time segment the trajectories of the agents are disjoint, clearly illustrating the safety of the plan. We show that standard notions of optimality (e.g., makespan) may create conflict with short explanations. Thus, we propose meta-algorithms, namely \emph{multi-agent plan segmenting}-X (MAPS-X) and its lazy variant, that can be plugged on existing centralized sampling-based tree planners X to produce plans with good explanations using a desirable number of images. We demonstrate the efficacy of this explanation-planning scheme and extensively evaluate the performance of MAPS-X