 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManifold Relevance Determination: Learning the Latent Space of Robotics
Paper and Code
May 23, 2017
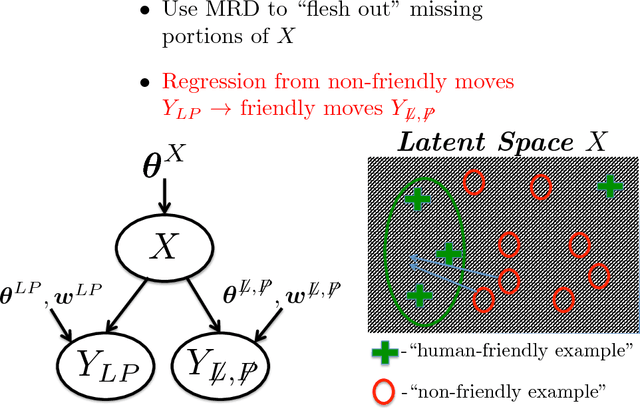
In this article we present the basics of manifold relevance determination (MRD) as introduced in \cite{mrd}, and some applications where the technology might be of particular use. Section 1 acts as a short tutorial of the ideas developed in \cite{mrd}, while Section 2 presents possible applications in sensor fusion, multi-agent SLAM, and "human-appropriate" robot movement (e.g. legibility and predictability~\cite{dragan-hri-2013}). In particular, we show how MRD can be used to construct the underlying models in a data driven manner, rather than directly leveraging first principles theories (e.g., physics, psychology) as is commonly the case for sensor fusion, SLAM, and human robot interaction. We note that [Bekiroglu et al., 2016] leveraged MRD for correcting unstable robot grasps to stable robot grasps.