 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMahalanobis k-NN: A Statistical Lens for Robust Point-Cloud Registrations
Paper and Code
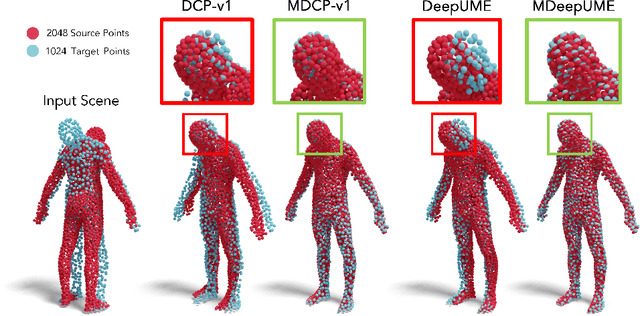
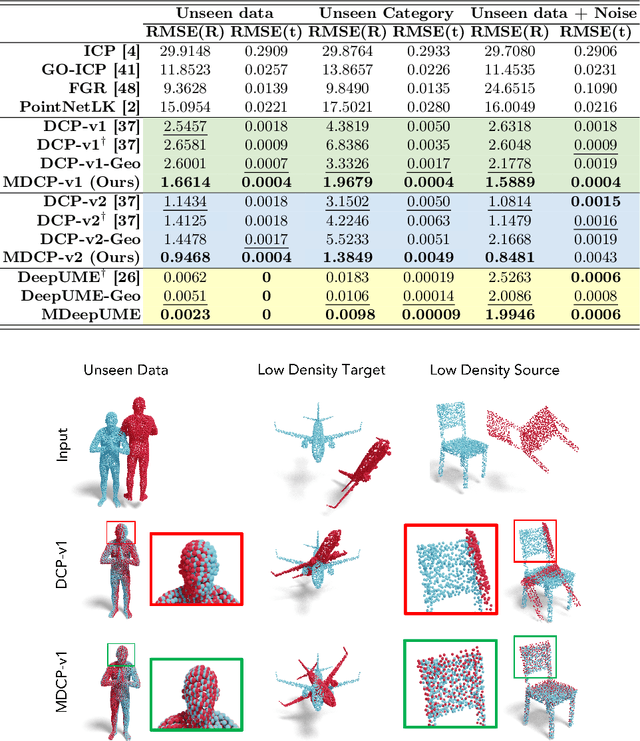
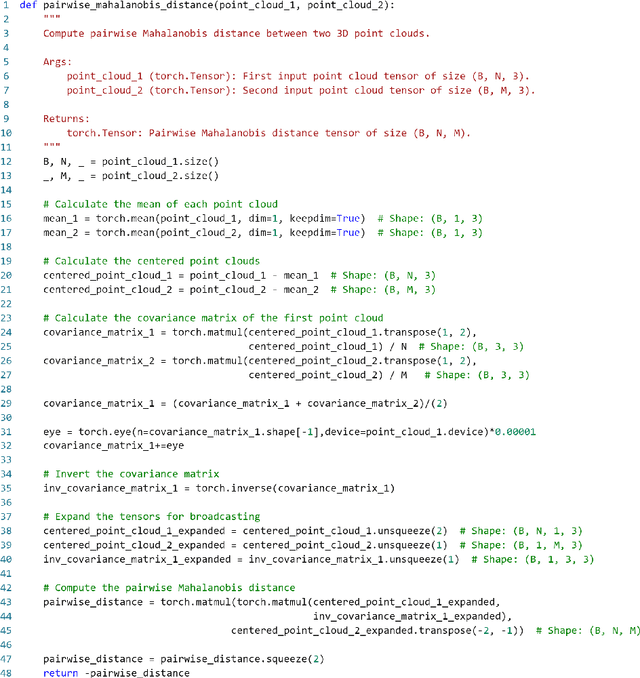
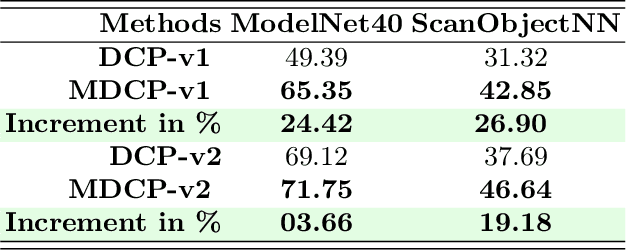
In this paper, we discuss Mahalanobis k-NN: a statistical lens designed to address the challenges of feature matching in learning-based point cloud registration when confronted with an arbitrary density of point clouds, either in the source or target point cloud. We tackle this by adopting Mahalanobis k-NN's inherent property to capture the distribution of the local neighborhood and surficial geometry. Our method can be seamlessly integrated into any local-graph-based point cloud analysis method. In this paper, we focus on two distinct methodologies: Deep Closest Point (DCP) and Deep Universal Manifold Embedding (DeepUME). Our extensive benchmarking on the ModelNet40 and Faust datasets highlights the efficacy of the proposed method in point cloud registration tasks. Moreover, we establish for the first time that the features acquired through point cloud registration inherently can possess discriminative capabilities. This is evident by a substantial improvement of about 20\% in the average accuracy observed in the point cloud few-shot classification task benchmarked on ModelNet40 and ScanObjectNN. The code is publicly available at https://github.com/TejasAnvekar/Mahalanobis-k-NN