 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagnetically actuated artificial microswimmers as mobile microparticle manipulators
Paper and Code
Sep 06, 2019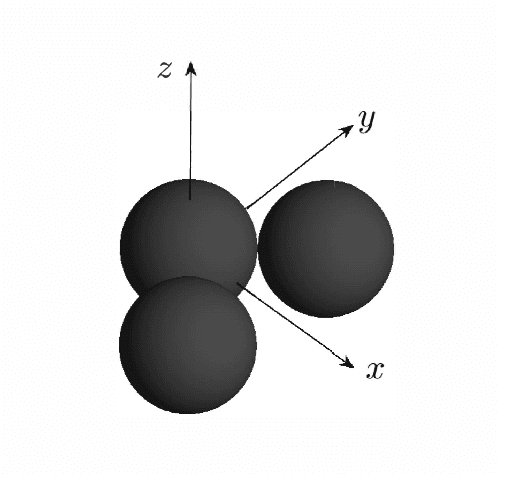
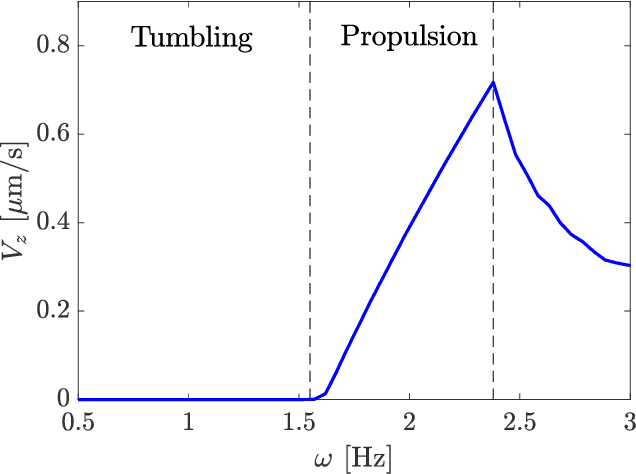
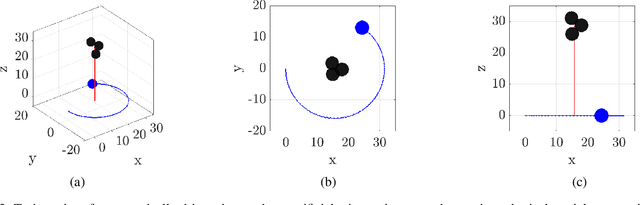

Micro-scale swimming robots have been envisaged for many medical applications such as targeted drug delivery, where the microrobot will be expected to navigate in a fluid through channels carrying a payload. Alternatively, in many cases, such a payload does not have to be physically bound to the swimmer, but may be instead manipulated and steered through the channel by the microrobot. We investigate this problem of contactless manipulation of a microparticle by mobile microswimmer in a fluid at low Reynolds number. We consider a model of a magnetically actuated artificial microswimmer, whose locomotion through a fluid induces a disturbance velocity field in the fluid, that then acts to propel a cargo particle in its vicinity. The problem investigated in this paper is therefore one of coupled locomotion-manipulation of two bodies in a fluid. The magnetic swimmer's motion is actuated by an externally applied magnetic field of constant strength but whose direction rotates at a constant rate in a plane. The swimmer propels itself in the direction perpendicular to this plane if the frequency associated with the periodic magnetic field is above a critical frequency. Below this critical frequency, the swimmer tumbles in place without net locomotion. The coupled fluid-swimmer-cargo particle dynamics are solved numerically using the method of Stokesian dynamics. The induced motion of the cargo particle is shown to be controllable. This is achieved by switching the planes of rotation of the magnetic field and switching frequency of the magnetic field above and below the critical frequency. While a swimmer with a specific geometry has been used in the model, the results of this paper are applicable to swimmers with other geometries and means of propulsion. The results of this paper show that microswimmers can be utilized as mobile manipulators of microparticles in a fluid.