 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLOSTU: Fast, Scalable, and Uncertainty-Aware Triangulation
Paper and Code
Nov 18, 2023
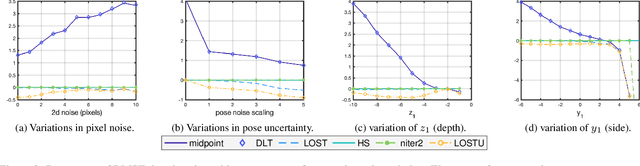


Triangulation algorithms often aim to minimize the reprojection ($L_2$) error, but this only provides the maximum likelihood estimate when there are no errors in the camera parameters or camera poses. Although recent advancements have yielded techniques to estimate camera parameters accounting for 3D point uncertainties, most structure from motion (SfM) pipelines still use older triangulation algorithms. This work leverages recent discoveries to provide a fast, scalable, and statistically optimal way to triangulate called LOSTU. Results show that LOSTU consistently produces lower 3D reconstruction errors than conventional $L_2$ triangulation methods -- often allowing LOSTU to successfully triangulate more points. Moreover, in addition to providing a better 3D reconstruction, LOSTU can be substantially faster than Levenberg-Marquardt (or similar) optimization schemes.