 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-time accuracy of ensemble Kalman filters for chaotic and machine-learned dynamical systems
Paper and Code
Dec 18, 2024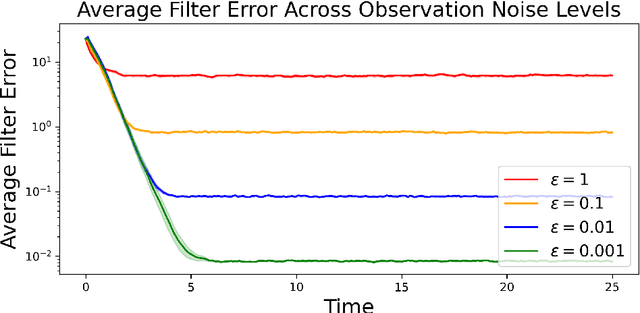


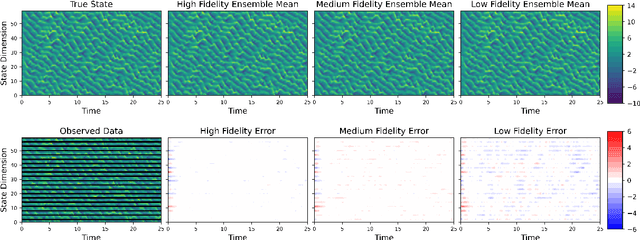
Filtering is concerned with online estimation of the state of a dynamical system from partial and noisy observations. In applications where the state is high dimensional, ensemble Kalman filters are often the method of choice. This paper establishes long-time accuracy of ensemble Kalman filters. We introduce conditions on the dynamics and the observations under which the estimation error remains small in the long-time horizon. Our theory covers a wide class of partially-observed chaotic dynamical systems, which includes the Navier-Stokes equations and Lorenz models. In addition, we prove long-time accuracy of ensemble Kalman filters with surrogate dynamics, thus validating the use of machine-learned forecast models in ensemble data assimilation.