 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocalizing Grasp Affordances in 3-D Points Clouds Using Taubin Quadric Fitting
Paper and Code
Nov 13, 2013
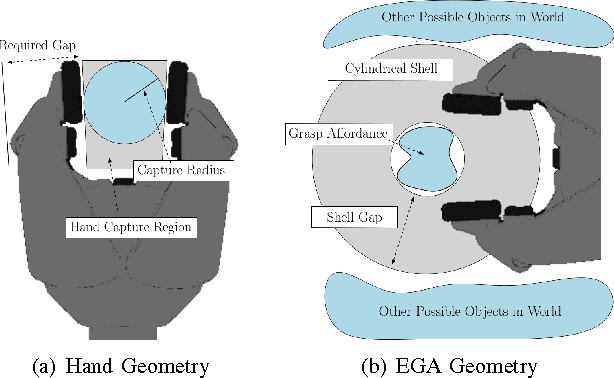
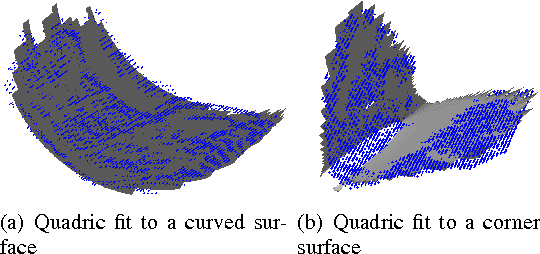
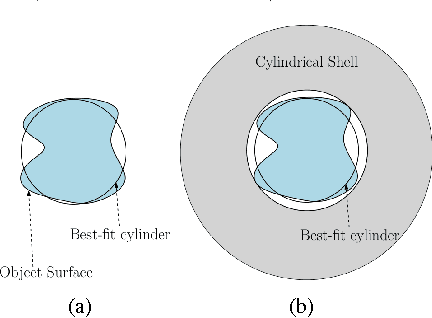
Perception-for-grasping is a challenging problem in robotics. Inexpensive range sensors such as the Microsoft Kinect provide sensing capabilities that have given new life to the effort of developing robust and accurate perception methods for robot grasping. This paper proposes a new approach to localizing enveloping grasp affordances in 3-D point clouds efficiently. The approach is based on modeling enveloping grasp affordances as a cylindrical shells that corresponds to the geometry of the robot hand. A fast and accurate fitting method for quadratic surfaces is the core of our approach. An evaluation on a set of cluttered environments shows high precision and recall statistics. Our results also show that the approach compares favorably with some alternatives, and that it is efficient enough to be employed for robot grasping in real-time.