 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM Granularity for On-the-Fly Robot Control
Paper and Code
Jun 20, 2024

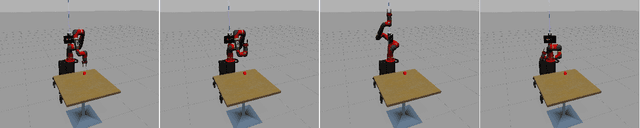
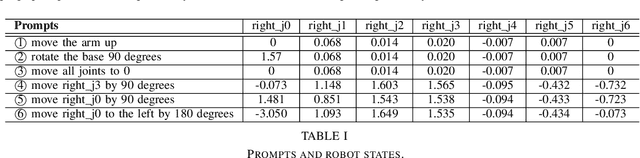
Assistive robots have attracted significant attention due to their potential to enhance the quality of life for vulnerable individuals like the elderly. The convergence of computer vision, large language models, and robotics has introduced the `visuolinguomotor' mode for assistive robots, where visuals and linguistics are incorporated into assistive robots to enable proactive and interactive assistance. This raises the question: \textit{In circumstances where visuals become unreliable or unavailable, can we rely solely on language to control robots, i.e., the viability of the `linguomotor` mode for assistive robots?} This work takes the initial steps to answer this question by: 1) evaluating the responses of assistive robots to language prompts of varying granularities; and 2) exploring the necessity and feasibility of controlling the robot on-the-fly. We have designed and conducted experiments on a Sawyer cobot to support our arguments. A Turtlebot robot case is designed to demonstrate the adaptation of the solution to scenarios where assistive robots need to maneuver to assist. Codes will be released on GitHub soon to benefit the community.