 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLévy Flight Foraging Hypothesis-based Autonomous Memoryless Search Under Sparse Rewards
Paper and Code
Dec 12, 2018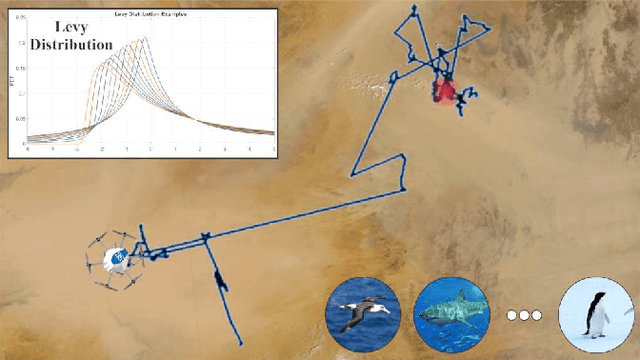

Autonomous robots are commonly tasked with the problem of area exploration and search for certain targets or artifacts of interest to be tracked. Traditionally, the problem formulation considered is that of complete search and thus - ideally - identification of all targets of interest. An important problem however which is not often addressed is that of time-efficient memoryless search under sparse rewards that may be worth visited any number of items. In this paper we specifically address the largely understudied problem of optimizing the "time-of-arrival" or "time-of-detection" to robotically search for sparsely distributed rewards (detect targets of interest) within large-scale environments and subject to memoryless exploration. At the core of the proposed solution is the fact that a search-based L\'evy walk consisting of a constant velocity search following a L\'evy flight path is optimal for searching sparse and randomly distributed target regions in the lack of map memory. A set of results accompany the presentation of the method, demonstrate its properties and justify the purpose of its use towards large-scale area exploration autonomy.