 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Cutting Edge Deep Learning Based Image Matching for Reconstructing a Large Scene from Sparse Images
Paper and Code
Oct 02, 2023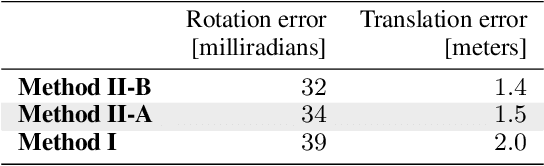


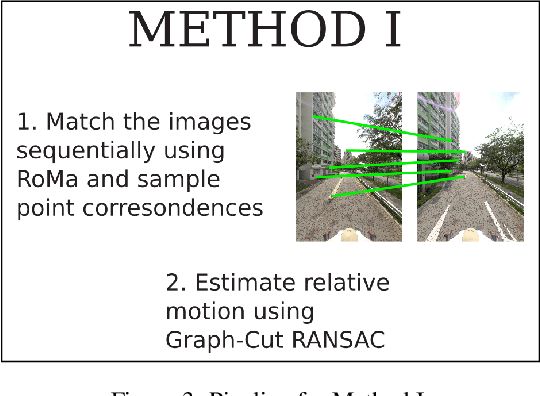
We present the top ranked solution for the AISG-SLA Visual Localisation Challenge benchmark (IJCAI 2023), where the task is to estimate relative motion between images taken in sequence by a camera mounted on a car driving through an urban scene. For matching images we use our recent deep learning based matcher RoMa. Matching image pairs sequentially and estimating relative motion from point correspondences sampled by RoMa already gives very competitive results -- third rank on the challenge benchmark. To improve the estimations we extract keypoints in the images, match them using RoMa, and perform structure from motion reconstruction using COLMAP. We choose our recent DeDoDe keypoints for their high repeatability. Further, we address time jumps in the image sequence by matching specific non-consecutive image pairs based on image retrieval with DINOv2. These improvements yield a solution beating all competitors. We further present a loose upper bound on the accuracy obtainable by the image retrieval approach by also matching hand-picked non-consecutive pairs.