 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Drive Small Scale Cars from Scratch
Paper and Code
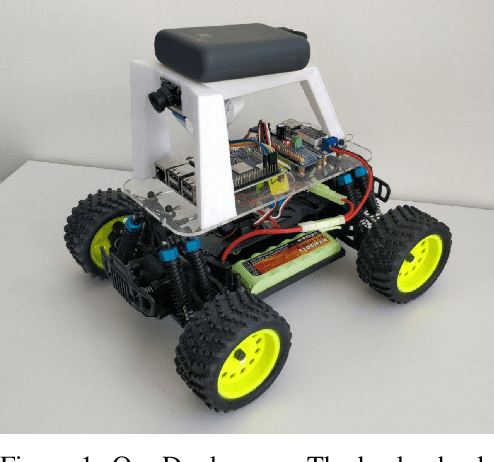
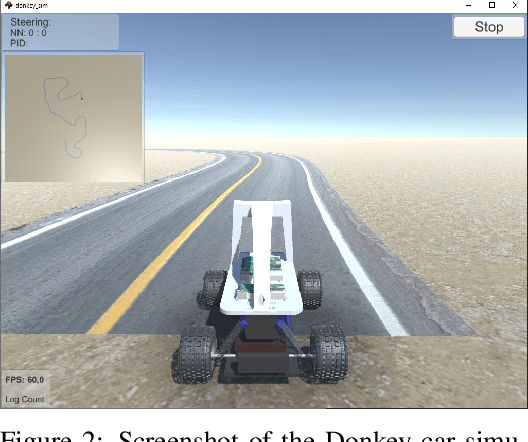
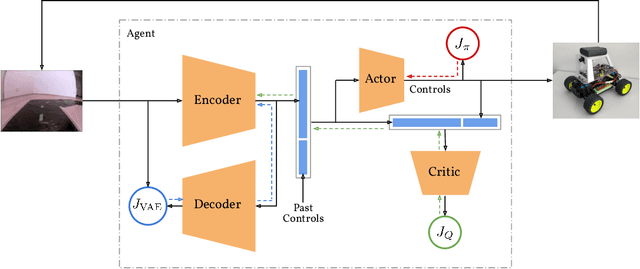
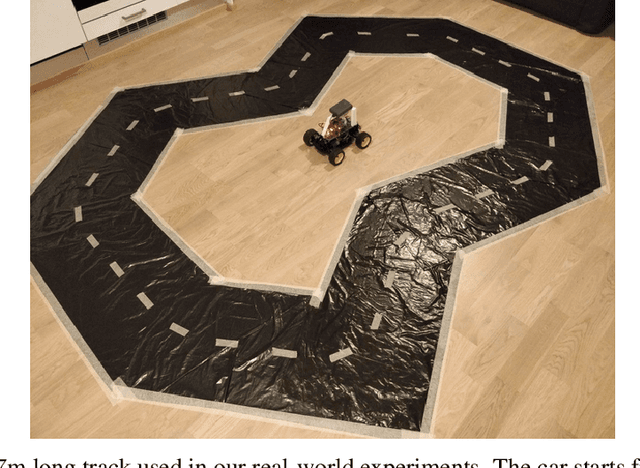
We consider the problem of learning to drive low-cost small scale cars using reinforcement learning. It is challenging to handle the long-tailed distributions of events in the real-world with handcrafted logical rules and reinforcement learning could be a potentially more scalable solution to deal with them. We adopt an existing platform called Donkey car for low-cost repeatable and reproducible research in autonomous driving. We consider the task of learning to drive around a track, given only monocular image observations from an on-board camera. We demonstrate that the soft actor-critic algorithm combined with state representation learning using a variational autoencoder can learn to drive around randomly generated tracks on the Donkey car simulator and a real-world track using the Donkey car platform. Our agent can learn from scratch using sparse and noisy rewards within just 10 minutes of driving experience.