 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Control Latent Representations for Few-Shot Learning of Named Entities
Paper and Code
Nov 19, 2019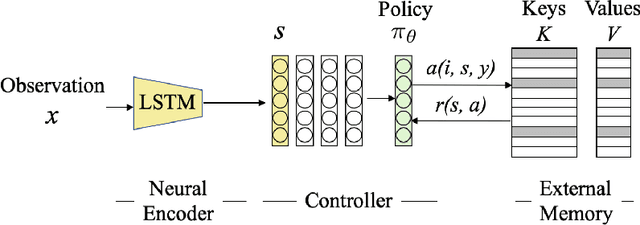

Humans excel in continuously learning with small data without forgetting how to solve old problems. However, neural networks require large datasets to compute latent representations across different tasks while minimizing a loss function. For example, a natural language understanding (NLU) system will often deal with emerging entities during its deployment as interactions with users in realistic scenarios will generate new and infrequent names, events, and locations. Here, we address this scenario by introducing an RL trainable controller that disentangles the representation learning of a neural encoder from its memory management role. Our proposed solution is straightforward and simple: we train a controller to execute an optimal sequence of reading and writing operations on an external memory with the goal of leveraging diverse activations from the past and provide accurate predictions. Our approach is named Learning to Control (LTC) and allows few-shot learning with two degrees of memory plasticity. We experimentally show that our system obtains accurate results for few-shot learning of entity recognition in the Stanford Task-Oriented Dialogue dataset.