 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning the Reward Function for a Misspecified Model
Paper and Code


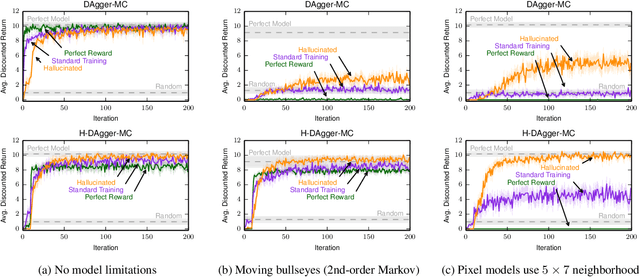
In model-based reinforcement learning it is typical to decouple the problems of learning the dynamics model and learning the reward function. However, when the dynamics model is flawed, it may generate erroneous states that would never occur in the true environment. It is not clear a priori what value the reward function should assign to such states. This paper presents a novel error bound that accounts for the reward model's behavior in states sampled from the model. This bound is used to extend the existing Hallucinated DAgger-MC algorithm, which offers theoretical performance guarantees in deterministic MDPs that do not assume a perfect model can be learned. Empirically, this approach to reward learning can yield dramatic improvements in control performance when the dynamics model is flawed.