 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning for Adaptive Real-time Search
Paper and Code
Jul 06, 2004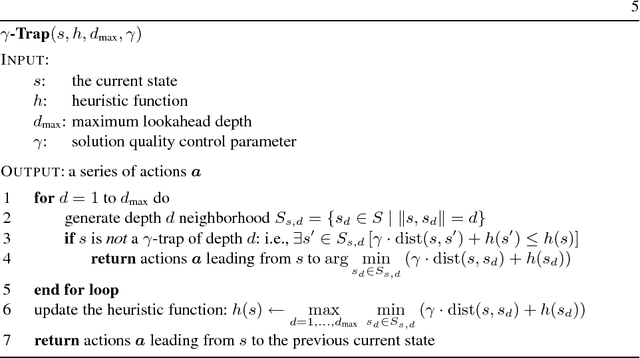
Real-time heuristic search is a popular model of acting and learning in intelligent autonomous agents. Learning real-time search agents improve their performance over time by acquiring and refining a value function guiding the application of their actions. As computing the perfect value function is typically intractable, a heuristic approximation is acquired instead. Most studies of learning in real-time search (and reinforcement learning) assume that a simple value-function-greedy policy is used to select actions. This is in contrast to practice, where high-performance is usually attained by interleaving planning and acting via a lookahead search of a non-trivial depth. In this paper, we take a step toward bridging this gap and propose a novel algorithm that (i) learns a heuristic function to be used specifically with a lookahead-based policy, (ii) selects the lookahead depth adaptively in each state, (iii) gives the user control over the trade-off between exploration and exploitation. We extensively evaluate the algorithm in the sliding tile puzzle testbed comparing it to the classical LRTA* and the more recent weighted LRTA*, bounded LRTA*, and FALCONS. Improvements of 5 to 30 folds in convergence speed are observed.