 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Accurate, Comfortable and Human-like Driving
Paper and Code
Mar 26, 2019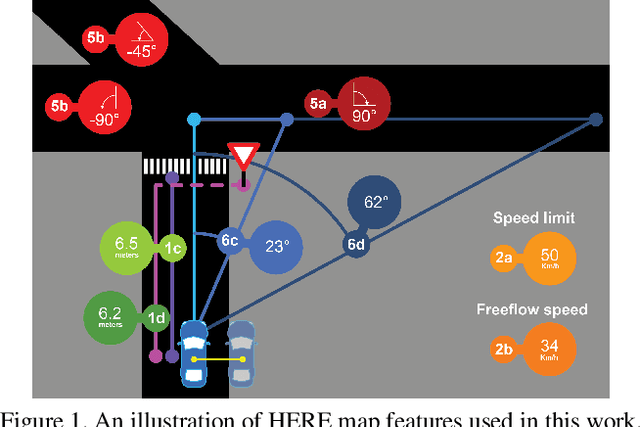
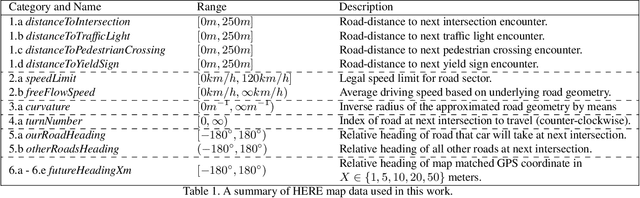
Autonomous vehicles are more likely to be accepted if they drive accurately, comfortably, but also similar to how human drivers would. This is especially true when autonomous and human-driven vehicles need to share the same road. The main research focus thus far, however, is still on improving driving accuracy only. This paper formalizes the three concerns with the aim of accurate, comfortable and human-like driving. Three contributions are made in this paper. First, numerical map data from HERE Technologies are employed for more accurate driving; a set of map features which are believed to be relevant to driving are engineered to navigate better. Second, the learning procedure is improved from a pointwise prediction to a sequence-based prediction and passengers' comfort measures are embedded into the learning algorithm. Finally, we take advantage of the advances in adversary learning to learn human-like driving; specifically, the standard L1 or L2 loss is augmented by an adversary loss which is based on a discriminator trained to distinguish between human driving and machine driving. Our model is trained and evaluated on the Drive360 dataset, which features 60 hours and 3000 km of real-world driving data. Extensive experiments show that our driving model is more accurate, more comfortable and behaves more like a human driver than previous methods. The resources of this work will be released on the project page.