 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLazily Adapted Constant Kinky Inference for Nonparametric Regression and Model-Reference Adaptive Control
Paper and Code
Apr 12, 2018

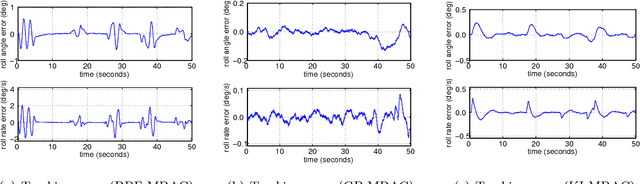

Techniques known as Nonlinear Set Membership prediction, Lipschitz Interpolation or Kinky Inference are approaches to machine learning that utilise presupposed Lipschitz properties to compute inferences over unobserved function values. Provided a bound on the true best Lipschitz constant of the target function is known a priori they offer convergence guarantees as well as bounds around the predictions. Considering a more general setting that builds on Hoelder continuity relative to pseudo-metrics, we propose an online method for estimating the Hoelder constant online from function value observations that possibly are corrupted by bounded observational errors. Utilising this to compute adaptive parameters within a kinky inference rule gives rise to a nonparametric machine learning method, for which we establish strong universal approximation guarantees. That is, we show that our prediction rule can learn any continuous function in the limit of increasingly dense data to within a worst-case error bound that depends on the level of observational uncertainty. We apply our method in the context of nonparametric model-reference adaptive control (MRAC). Across a range of simulated aircraft roll-dynamics and performance metrics our approach outperforms recently proposed alternatives that were based on Gaussian processes and RBF-neural networks. For discrete-time systems, we provide guarantees on the tracking success of our learning-based controllers both for the batch and the online learning setting.