Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLattices of sensors reconsidered when less information is preferred
Paper and Code
Jun 01, 2021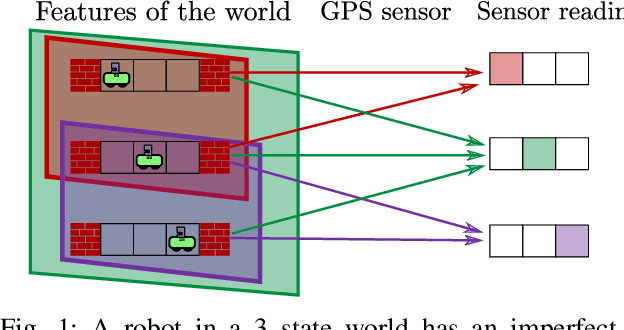
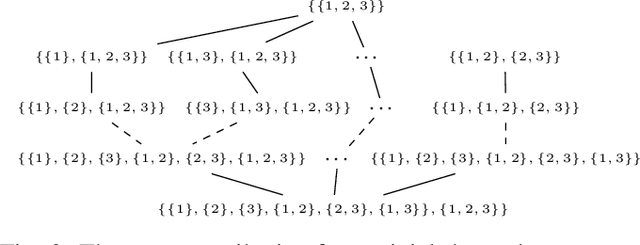
To treat sensing limitations (with uncertainty in both conflation of information and noise) we model sensors as covers. This leads to a semilattice organization of abstract sensors that is appropriate even when additional information is problematic (e.g., for tasks involving privacy considerations).
* 3 pages, 2 figures, accepted by 2021 ICRA Workshop on Compositional
Robotics: Mathematics and Tools
View paper on