 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLattice piecewise affine approximation of explicit nonlinear model predictive control with application to trajectory tracking of mobile robot
Paper and Code
Feb 16, 2023
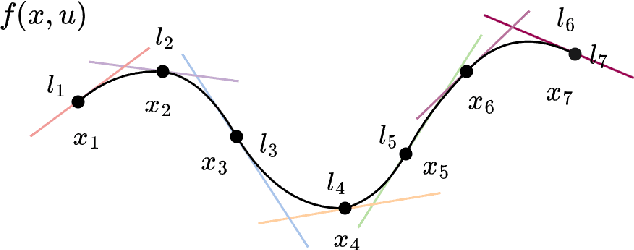
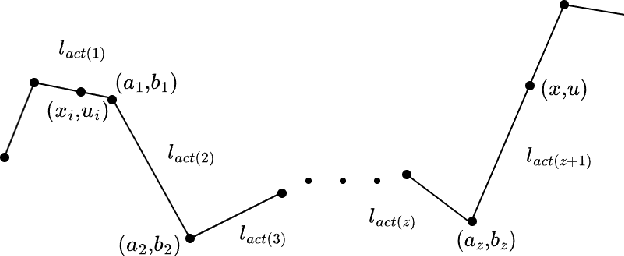
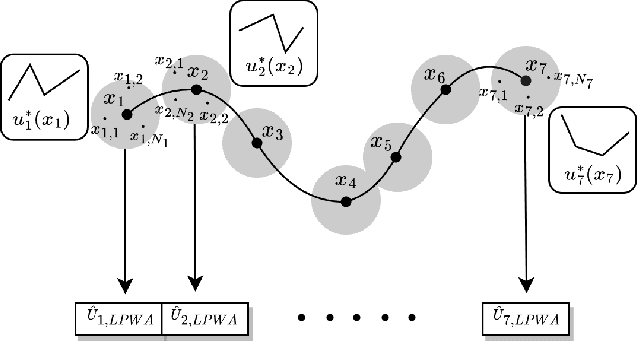
To promote the widespread use of mobile robots in diverse fields, the performance of trajectory tracking must be ensured. To address the constraints and nonlinear features associated with mobile robot systems, we apply nonlinear model predictive control (MPC) to realize the trajectory tracking of mobile robots. Specifically, to alleviate the online computational complexity of nonlinear MPC, this paper devises a lattice piecewise affine (PWA) approximation method that can approximate both the nonlinear system and control law of explicit nonlinear MPC. The kinematic model of the mobile robot is successively linearized along the trajectory to obtain a linear time-varying description of the system, which is then expressed using a lattice PWA model. Subsequently, the nonlinear MPC problem can be transformed into a series of linear MPC problems. Furthermore, to reduce the complexity of online calculation of multiple linear MPC problems, we approximate the optimal solution of the linear MPC by using the lattice PWA model. That is, for different sampling states, the optimal control inputs are obtained, and lattice PWA approximations are constructed for the state control pairs. Simulations are performed to evaluate the performance of our method in comparison with the linear MPC and explicit linear MPC frameworks. The results show that compared with the explicit linear MPC, our method has a higher online computing speed and can decrease the offline computing time without significantly increasing the tracking error.